搜索到
362
篇与
的结果
-
 ViBe(Visual Background Extractor)背景模型介绍与实现 1.原理介绍1.1 模型工作原理背景物体就是指静止的或是非常缓慢的移动的物体,而前景物体就对应移动的物体。所以我们可以把物体检测看出一个分类问题,也就是来确定一个像素点是否属于背景点。在ViBe模型中,背景模型为每个像素点存储了一个样本集,然后将每一个新的像素值和样本集进行比较来判断是否属于背景点。可以知道如果一个新的观察值属于背景点那么它应该和样本集中的采样值比较接近。该模型主要包括三个方面:(1)算法模型初始化;(2)像素的分类过程;(3)模型的更新策略。1.2关于样本集的大小假定我们要处理的每一帧图像是$M \times N$ 个像素的,$x$表示某帧图像的一个像素点。模型要为$M \times N$中每个像素建立一个样本集,$x$像素的样本集可以表示为$$ M(x)=\{p_1 , p_2 , p_3 … p_n\} $$每个样本集的大小为n,n这个值如何确定的,暂时不用管,一般是实验得出的,论文中取$n=20$。所以样本集的总大小为$M \times N \times n$。1.3模型的初始化初始化就是建立背景模型的过程。通用的检测算法的初始化需要一定长度的视频序列来完成,通常要耗费数秒的时间,这极大的影戏的检测的实时性,对于手持相机实时拍照来讲并不合适。ViBe的初始化仅仅通过一帧图像即可完成。ViBe初始化就是填充像素的样本集的过程。由于在一帧图像中不可能包含像素点的时空分布信息,我们利用了相近像素点拥有相近的时空分布特性,具体来讲就是:对于一个像素点$x$,随机的选择它的邻居点$NG(x)$的像素值作为它的模型样本值$M_0(x)$。$$ M_0(x) = {p_0(y | y ∈NG(x))} $$这种初始化方法的优缺点:优点对于噪声的反应比较灵敏,计算量小速度快,不仅减少了背景模型建立的过程,还可以处理背景突然变化的情况,当检测到背景突然变化明显时,只需要舍弃原始的模型,重新利用变化后的首帧图像建立背景模型。缺点用于作平均的几帧初始图像中可能采用了运动物体的像素,这种条件下初始化样本集,容易引入拖影(Ghost)区域;1.4像素的分类过程(前景检测)如下图,假定当前帧为第$ t$ 帧,$p_t(x)$表示第$ t$ 帧图像 $x$ 像素的像素值,图中的$p1$到$p6$都是$x$像素的样本集中的值。那图中的横坐标C1和纵坐标C2是什么呢?我们假定我们处理的图像每个像素是RGB格式的,即一个像素值由R,G,B三个值表示,那么图中的坐标其实还隐藏了C3,即C1,C2,C3表示的正是三个通道值,如果是灰度图的话下面的图就要画成一维一条直线了。接下来我们根据预先设定的半径R统计以当前像素点为中心的圆形区域$S_R(p_t{x})$(实际对应到RGB空间中为球形区域)中包含的该像素点的样本集中的样本的数量,这里记为#。在距$p_t(x)$值半径R距离范围内的样本值有$p_2,p_4$,在半径R范围内的样本值总数计为#,那么下图#=2。让后将该值与预先设定的阈值#min(论文中给出的值是2)进行对比,当#<#min的值时,x这个像素就被标记为前景像素,否则就将其标记为背景像素,依次处理所有像素,就能得出前景图像了1.5模型的更新策略即使已经建立起了背景模型,也应该对背景模型进行不断的更新,这样才能使得背景模型能够适应背景的不断变化(如光照变化,背景物体变更等)。A. 普通更新策略对于其他的背景提取算法,背景模型有两种不同的更新策略:保守更新策略:前景点永远不会用来填充模型这样会引起死锁,产生Ghost区域。比如初始化的时候如果一块静止的区域被错误的检测为运动的,那么在这种策略下它永远会被当做运动的物体来对待;Blind策略:前景和背景都可以用来更新背景模型;对死锁不敏感,但这样的缺点在于,缓慢移动的物体会融入到背景中,无法检测出来;B. ViBe算法更新策略ViBe算法中,使用的更新策略是:保守更新策略 + 前景点计数法 + 随机子采样。保守更新策略:前景点永远不会用来填充模型前景点计数法:对像素点进行统计,如果某个像素点连续N次被检测为前景,则将其更新为背景点;随机子采样:在每一个新的视频帧中都去更新背景模型中的每一个像素点的样本值是没有必要的,当一个像素点被分类为背景点时,它有1/φ的概率去更新背景模型。这就决定了ViBe算法的更新策略的其他属性:无记忆更新策略:每次确定需要更新像素点的背景模型时,以新的像素值随机取代该像素点样本集的一个样本值;时间取样更新策略:并非每处理一帧数据,都需要更新处理,而是按一定的更新率更新背景模型;当一个像素点被判定为背景时,它有1/φ的概率更新背景模型;φ是时间采样因子,一般取值为16;空间邻域更新策略:针对需要更新像素点,在该像素点的邻域中随机选择一个像素点,以新选择的像素点更新被选中的背景模型;C. ViBe算法具体更新的方法:每个背景点都有1/φ的概率更新该像素点的模型样本值;有1/φ的概率去更新该像素点邻居点的模型样本值;前景点计数达到临界值时,将其变为背景,并有1/ φ的概率去更新自己的模型样本值。2.算法实现import numpy as np import cv2 class ViBe: ''' ViBe运动检测,分割背景和前景运动图像 ''' def __init__(self,num_sam=20,min_match=2,radiu=20,rand_sam=16): self.defaultNbSamples = num_sam #每个像素的样本集数量,默认20个 self.defaultReqMatches = min_match #前景像素匹配数量,如果超过此值,则认为是背景像素 self.defaultRadius = radiu #匹配半径,即在该半径内则认为是匹配像素 self.defaultSubsamplingFactor = rand_sam #随机数因子,如果检测为背景,每个像素有1/defaultSubsamplingFactor几率更新样本集和领域样本集 self.background = 0 self.foreground = 255 def __buildNeighborArray(self,img): ''' 构建一副图像中每个像素的邻域数组 参数:输入灰度图像 返回值:每个像素9邻域数组,保存到self.samples中 ''' height,width=img.shape self.samples=np.zeros((self.defaultNbSamples,height,width),dtype=np.uint8) #生成随机偏移数组,用于计算随机选择的邻域坐标 ramoff_xy=np.random.randint(-1,2,size=(2,self.defaultNbSamples,height,width)) #ramoff_x=np.random.randint(-1,2,size=(self.defaultNbSamples,2,height,width)) #xr_=np.zeros((height,width)) xr_=np.tile(np.arange(width),(height,1)) #yr_=np.zeros((height,width)) yr_=np.tile(np.arange(height),(width,1)).T xyr_=np.zeros((2,self.defaultNbSamples,height,width)) for i in range(self.defaultNbSamples): xyr_[1,i]=xr_ xyr_[0,i]=yr_ xyr_=xyr_+ramoff_xy xyr_[xyr_<0]=0 tpr_=xyr_[1,:,:,-1] tpr_[tpr_>=width]=width-1 tpb_=xyr_[0,:,-1,:] tpb_[tpb_>=height]=height-1 xyr_[0,:,-1,:]=tpb_ xyr_[1,:,:,-1]=tpr_ #xyr=np.transpose(xyr_,(2,3,1,0)) xyr=xyr_.astype(int) self.samples=img[xyr[0,:,:,:],xyr[1,:,:,:]] def ProcessFirstFrame(self,img): ''' 处理视频的第一帧 1、初始化每个像素的样本集矩阵 2、初始化前景矩阵的mask 3、初始化前景像素的检测次数矩阵 参数: img: 传入的numpy图像素组,要求灰度图像 返回值: 每个像素的样本集numpy数组 ''' self.__buildNeighborArray(img) self.fgCount=np.zeros(img.shape) #每个像素被检测为前景的次数 self.fgMask=np.zeros(img.shape) #保存前景像素 def Update(self,img): ''' 处理每帧视频,更新运动前景,并更新样本集。该函数是本类的主函数 输入:灰度图像 ''' height,width=img.shape #计算当前像素值与样本库中值之差小于阀值范围RADIUS的个数,采用numpy的广播方法 dist=np.abs((self.samples.astype(float)-img.astype(float)).astype(int)) dist[dist<self.defaultRadius]=1 dist[dist>=self.defaultRadius]=0 matches=np.sum(dist,axis=0) #如果大于匹配数量阀值,则是背景,matches值False,否则为前景,值True matches=matches<self.defaultReqMatches self.fgMask[matches]=self.foreground self.fgMask[~matches]=self.background #前景像素计数+1,背景像素的计数设置为0 self.fgCount[matches]=self.fgCount[matches]+1 self.fgCount[~matches]=0 #如果某个像素连续50次被检测为前景,则认为一块静止区域被误判为运动,将其更新为背景点 fakeFG=self.fgCount>50 matches[fakeFG]=False #此处是该更新函数的关键 #更新背景像素的样本集,分两个步骤 #1、每个背景像素有1/self.defaultSubsamplingFactor几率更新自己的样本集 ##更新样本集方式为随机选取该像素样本集中的一个元素,更新为当前像素的值 #2、每个背景像素有1/self.defaultSubsamplingFactor几率更新邻域的样本集 ##更新邻域样本集方式为随机选取一个邻域点,并在该邻域点的样本集中随机选择一个更新为当前像素值 #更新自己样本集 upfactor=np.random.randint(self.defaultSubsamplingFactor,size=img.shape) #生成每个像素的更新几率 upfactor[matches]=100 #前景像素设置为100,其实可以是任何非零值,表示前景像素不需要更新样本集 upSelfSamplesInd=np.where(upfactor==0) #满足更新自己样本集像素的索引 upSelfSamplesPosition=np.random.randint(self.defaultNbSamples,size=upSelfSamplesInd[0].shape) #生成随机更新自己样本集的的索引 samInd=(upSelfSamplesPosition,upSelfSamplesInd[0],upSelfSamplesInd[1]) self.samples[samInd]=img[upSelfSamplesInd] #更新自己样本集中的一个样本为本次图像中对应像素值 #更新邻域样本集 upfactor=np.random.randint(self.defaultSubsamplingFactor,size=img.shape) #生成每个像素的更新几率 upfactor[matches]=100 #前景像素设置为100,其实可以是任何非零值,表示前景像素不需要更新样本集 upNbSamplesInd=np.where(upfactor==0) #满足更新邻域样本集背景像素的索引 nbnums=upNbSamplesInd[0].shape[0] ramNbOffset=np.random.randint(-1,2,size=(2,nbnums)) #分别是X和Y坐标的偏移 nbXY=np.stack(upNbSamplesInd) nbXY+=ramNbOffset nbXY[nbXY<0]=0 nbXY[0,nbXY[0,:]>=height]=height-1 nbXY[1,nbXY[1,:]>=width]=width-1 nbSPos=np.random.randint(self.defaultNbSamples,size=nbnums) nbSamInd=(nbSPos,nbXY[0],nbXY[1]) self.samples[nbSamInd]=img[upNbSamplesInd] def getFGMask(self): ''' 返回前景mask ''' return self.fgMask调用测试import matplotlib.pyplot as plt # 使用opencv加载目标视频 video_path = "./test.mp4" capture = cv2.VideoCapture(video_path) # 实例化ViBe模型 vibe=ViBe() # 第一帧标志 flag_first_frame = True while True: # 逐一读取视频帧 ret, frame = capture.read() if not ret: break # 将视频帧转为灰度图 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 如果是第一帧,则用于初始化背景模型 if flag_first_frame: vibe.ProcessFirstFrame(gray) flag_first_frame = False continue # 否则更新背景模型 vibe.Update(gray) # 获取前景并转为uint8类型 segMat=vibe.getFGMask() segMat = segMat.astype(np.uint8) # 拼接出显示图片 img_show = np.hstack((frame,cv2.cvtColor(segMat,cv2.COLOR_GRAY2BGR))) # 缩放到原来的二分之一并显示 x, y = img_show.shape[0:2] img_show = cv2.resize(img_show, (int(y / 2), int(x / 2))) cv2.imshow('vibe',img_show) if cv2.waitKey(50)&0xFF==ord("q"): break # 释放资源 capture.release() cv2.destroyAllWindows()参考资料《O. Barnich and M. Van Droogenbroeck. ViBe: a powerful random technique to estimate the background in video sequences.》ViBe背景建模算法ViBe:基于Python实现的加速版(2019.10)背景提取算法——帧间差分法、背景差分法、ViBe算法、ViBe+算法
ViBe(Visual Background Extractor)背景模型介绍与实现 1.原理介绍1.1 模型工作原理背景物体就是指静止的或是非常缓慢的移动的物体,而前景物体就对应移动的物体。所以我们可以把物体检测看出一个分类问题,也就是来确定一个像素点是否属于背景点。在ViBe模型中,背景模型为每个像素点存储了一个样本集,然后将每一个新的像素值和样本集进行比较来判断是否属于背景点。可以知道如果一个新的观察值属于背景点那么它应该和样本集中的采样值比较接近。该模型主要包括三个方面:(1)算法模型初始化;(2)像素的分类过程;(3)模型的更新策略。1.2关于样本集的大小假定我们要处理的每一帧图像是$M \times N$ 个像素的,$x$表示某帧图像的一个像素点。模型要为$M \times N$中每个像素建立一个样本集,$x$像素的样本集可以表示为$$ M(x)=\{p_1 , p_2 , p_3 … p_n\} $$每个样本集的大小为n,n这个值如何确定的,暂时不用管,一般是实验得出的,论文中取$n=20$。所以样本集的总大小为$M \times N \times n$。1.3模型的初始化初始化就是建立背景模型的过程。通用的检测算法的初始化需要一定长度的视频序列来完成,通常要耗费数秒的时间,这极大的影戏的检测的实时性,对于手持相机实时拍照来讲并不合适。ViBe的初始化仅仅通过一帧图像即可完成。ViBe初始化就是填充像素的样本集的过程。由于在一帧图像中不可能包含像素点的时空分布信息,我们利用了相近像素点拥有相近的时空分布特性,具体来讲就是:对于一个像素点$x$,随机的选择它的邻居点$NG(x)$的像素值作为它的模型样本值$M_0(x)$。$$ M_0(x) = {p_0(y | y ∈NG(x))} $$这种初始化方法的优缺点:优点对于噪声的反应比较灵敏,计算量小速度快,不仅减少了背景模型建立的过程,还可以处理背景突然变化的情况,当检测到背景突然变化明显时,只需要舍弃原始的模型,重新利用变化后的首帧图像建立背景模型。缺点用于作平均的几帧初始图像中可能采用了运动物体的像素,这种条件下初始化样本集,容易引入拖影(Ghost)区域;1.4像素的分类过程(前景检测)如下图,假定当前帧为第$ t$ 帧,$p_t(x)$表示第$ t$ 帧图像 $x$ 像素的像素值,图中的$p1$到$p6$都是$x$像素的样本集中的值。那图中的横坐标C1和纵坐标C2是什么呢?我们假定我们处理的图像每个像素是RGB格式的,即一个像素值由R,G,B三个值表示,那么图中的坐标其实还隐藏了C3,即C1,C2,C3表示的正是三个通道值,如果是灰度图的话下面的图就要画成一维一条直线了。接下来我们根据预先设定的半径R统计以当前像素点为中心的圆形区域$S_R(p_t{x})$(实际对应到RGB空间中为球形区域)中包含的该像素点的样本集中的样本的数量,这里记为#。在距$p_t(x)$值半径R距离范围内的样本值有$p_2,p_4$,在半径R范围内的样本值总数计为#,那么下图#=2。让后将该值与预先设定的阈值#min(论文中给出的值是2)进行对比,当#<#min的值时,x这个像素就被标记为前景像素,否则就将其标记为背景像素,依次处理所有像素,就能得出前景图像了1.5模型的更新策略即使已经建立起了背景模型,也应该对背景模型进行不断的更新,这样才能使得背景模型能够适应背景的不断变化(如光照变化,背景物体变更等)。A. 普通更新策略对于其他的背景提取算法,背景模型有两种不同的更新策略:保守更新策略:前景点永远不会用来填充模型这样会引起死锁,产生Ghost区域。比如初始化的时候如果一块静止的区域被错误的检测为运动的,那么在这种策略下它永远会被当做运动的物体来对待;Blind策略:前景和背景都可以用来更新背景模型;对死锁不敏感,但这样的缺点在于,缓慢移动的物体会融入到背景中,无法检测出来;B. ViBe算法更新策略ViBe算法中,使用的更新策略是:保守更新策略 + 前景点计数法 + 随机子采样。保守更新策略:前景点永远不会用来填充模型前景点计数法:对像素点进行统计,如果某个像素点连续N次被检测为前景,则将其更新为背景点;随机子采样:在每一个新的视频帧中都去更新背景模型中的每一个像素点的样本值是没有必要的,当一个像素点被分类为背景点时,它有1/φ的概率去更新背景模型。这就决定了ViBe算法的更新策略的其他属性:无记忆更新策略:每次确定需要更新像素点的背景模型时,以新的像素值随机取代该像素点样本集的一个样本值;时间取样更新策略:并非每处理一帧数据,都需要更新处理,而是按一定的更新率更新背景模型;当一个像素点被判定为背景时,它有1/φ的概率更新背景模型;φ是时间采样因子,一般取值为16;空间邻域更新策略:针对需要更新像素点,在该像素点的邻域中随机选择一个像素点,以新选择的像素点更新被选中的背景模型;C. ViBe算法具体更新的方法:每个背景点都有1/φ的概率更新该像素点的模型样本值;有1/φ的概率去更新该像素点邻居点的模型样本值;前景点计数达到临界值时,将其变为背景,并有1/ φ的概率去更新自己的模型样本值。2.算法实现import numpy as np import cv2 class ViBe: ''' ViBe运动检测,分割背景和前景运动图像 ''' def __init__(self,num_sam=20,min_match=2,radiu=20,rand_sam=16): self.defaultNbSamples = num_sam #每个像素的样本集数量,默认20个 self.defaultReqMatches = min_match #前景像素匹配数量,如果超过此值,则认为是背景像素 self.defaultRadius = radiu #匹配半径,即在该半径内则认为是匹配像素 self.defaultSubsamplingFactor = rand_sam #随机数因子,如果检测为背景,每个像素有1/defaultSubsamplingFactor几率更新样本集和领域样本集 self.background = 0 self.foreground = 255 def __buildNeighborArray(self,img): ''' 构建一副图像中每个像素的邻域数组 参数:输入灰度图像 返回值:每个像素9邻域数组,保存到self.samples中 ''' height,width=img.shape self.samples=np.zeros((self.defaultNbSamples,height,width),dtype=np.uint8) #生成随机偏移数组,用于计算随机选择的邻域坐标 ramoff_xy=np.random.randint(-1,2,size=(2,self.defaultNbSamples,height,width)) #ramoff_x=np.random.randint(-1,2,size=(self.defaultNbSamples,2,height,width)) #xr_=np.zeros((height,width)) xr_=np.tile(np.arange(width),(height,1)) #yr_=np.zeros((height,width)) yr_=np.tile(np.arange(height),(width,1)).T xyr_=np.zeros((2,self.defaultNbSamples,height,width)) for i in range(self.defaultNbSamples): xyr_[1,i]=xr_ xyr_[0,i]=yr_ xyr_=xyr_+ramoff_xy xyr_[xyr_<0]=0 tpr_=xyr_[1,:,:,-1] tpr_[tpr_>=width]=width-1 tpb_=xyr_[0,:,-1,:] tpb_[tpb_>=height]=height-1 xyr_[0,:,-1,:]=tpb_ xyr_[1,:,:,-1]=tpr_ #xyr=np.transpose(xyr_,(2,3,1,0)) xyr=xyr_.astype(int) self.samples=img[xyr[0,:,:,:],xyr[1,:,:,:]] def ProcessFirstFrame(self,img): ''' 处理视频的第一帧 1、初始化每个像素的样本集矩阵 2、初始化前景矩阵的mask 3、初始化前景像素的检测次数矩阵 参数: img: 传入的numpy图像素组,要求灰度图像 返回值: 每个像素的样本集numpy数组 ''' self.__buildNeighborArray(img) self.fgCount=np.zeros(img.shape) #每个像素被检测为前景的次数 self.fgMask=np.zeros(img.shape) #保存前景像素 def Update(self,img): ''' 处理每帧视频,更新运动前景,并更新样本集。该函数是本类的主函数 输入:灰度图像 ''' height,width=img.shape #计算当前像素值与样本库中值之差小于阀值范围RADIUS的个数,采用numpy的广播方法 dist=np.abs((self.samples.astype(float)-img.astype(float)).astype(int)) dist[dist<self.defaultRadius]=1 dist[dist>=self.defaultRadius]=0 matches=np.sum(dist,axis=0) #如果大于匹配数量阀值,则是背景,matches值False,否则为前景,值True matches=matches<self.defaultReqMatches self.fgMask[matches]=self.foreground self.fgMask[~matches]=self.background #前景像素计数+1,背景像素的计数设置为0 self.fgCount[matches]=self.fgCount[matches]+1 self.fgCount[~matches]=0 #如果某个像素连续50次被检测为前景,则认为一块静止区域被误判为运动,将其更新为背景点 fakeFG=self.fgCount>50 matches[fakeFG]=False #此处是该更新函数的关键 #更新背景像素的样本集,分两个步骤 #1、每个背景像素有1/self.defaultSubsamplingFactor几率更新自己的样本集 ##更新样本集方式为随机选取该像素样本集中的一个元素,更新为当前像素的值 #2、每个背景像素有1/self.defaultSubsamplingFactor几率更新邻域的样本集 ##更新邻域样本集方式为随机选取一个邻域点,并在该邻域点的样本集中随机选择一个更新为当前像素值 #更新自己样本集 upfactor=np.random.randint(self.defaultSubsamplingFactor,size=img.shape) #生成每个像素的更新几率 upfactor[matches]=100 #前景像素设置为100,其实可以是任何非零值,表示前景像素不需要更新样本集 upSelfSamplesInd=np.where(upfactor==0) #满足更新自己样本集像素的索引 upSelfSamplesPosition=np.random.randint(self.defaultNbSamples,size=upSelfSamplesInd[0].shape) #生成随机更新自己样本集的的索引 samInd=(upSelfSamplesPosition,upSelfSamplesInd[0],upSelfSamplesInd[1]) self.samples[samInd]=img[upSelfSamplesInd] #更新自己样本集中的一个样本为本次图像中对应像素值 #更新邻域样本集 upfactor=np.random.randint(self.defaultSubsamplingFactor,size=img.shape) #生成每个像素的更新几率 upfactor[matches]=100 #前景像素设置为100,其实可以是任何非零值,表示前景像素不需要更新样本集 upNbSamplesInd=np.where(upfactor==0) #满足更新邻域样本集背景像素的索引 nbnums=upNbSamplesInd[0].shape[0] ramNbOffset=np.random.randint(-1,2,size=(2,nbnums)) #分别是X和Y坐标的偏移 nbXY=np.stack(upNbSamplesInd) nbXY+=ramNbOffset nbXY[nbXY<0]=0 nbXY[0,nbXY[0,:]>=height]=height-1 nbXY[1,nbXY[1,:]>=width]=width-1 nbSPos=np.random.randint(self.defaultNbSamples,size=nbnums) nbSamInd=(nbSPos,nbXY[0],nbXY[1]) self.samples[nbSamInd]=img[upNbSamplesInd] def getFGMask(self): ''' 返回前景mask ''' return self.fgMask调用测试import matplotlib.pyplot as plt # 使用opencv加载目标视频 video_path = "./test.mp4" capture = cv2.VideoCapture(video_path) # 实例化ViBe模型 vibe=ViBe() # 第一帧标志 flag_first_frame = True while True: # 逐一读取视频帧 ret, frame = capture.read() if not ret: break # 将视频帧转为灰度图 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 如果是第一帧,则用于初始化背景模型 if flag_first_frame: vibe.ProcessFirstFrame(gray) flag_first_frame = False continue # 否则更新背景模型 vibe.Update(gray) # 获取前景并转为uint8类型 segMat=vibe.getFGMask() segMat = segMat.astype(np.uint8) # 拼接出显示图片 img_show = np.hstack((frame,cv2.cvtColor(segMat,cv2.COLOR_GRAY2BGR))) # 缩放到原来的二分之一并显示 x, y = img_show.shape[0:2] img_show = cv2.resize(img_show, (int(y / 2), int(x / 2))) cv2.imshow('vibe',img_show) if cv2.waitKey(50)&0xFF==ord("q"): break # 释放资源 capture.release() cv2.destroyAllWindows()参考资料《O. Barnich and M. Van Droogenbroeck. ViBe: a powerful random technique to estimate the background in video sequences.》ViBe背景建模算法ViBe:基于Python实现的加速版(2019.10)背景提取算法——帧间差分法、背景差分法、ViBe算法、ViBe+算法 -
-
便宜的VPS/云服务器推荐 1C2G5M指的是:1核CPU,2G内存,5M带宽1.国内服务器腾讯云双十一,1C2G6M,58元/年 (约4.8元/月);2C4G8M,70元/年(约5.8元/月),198元/3年(约5.5元/月)。阿里云双十一: 2核2G 5M,60元/年(约5元/月);2核4G 5M,200元/3年(约5.5元/月)。UCloud双十一: 1核2G,128元/3年(约3.6元/月);2核4G,323元/3年(约8.9元/月)。阿里云学生机,1C2G5M,9.5元/月,阿里云ECS/轻量应用云。 24岁以下免学生认证。阿里云小站,2C2G5M,60元/年(约5元/月)。阿里云轻量应用服务器,香港/新加坡2C2G30M,408元/年(约34元/月);国内2C2G5M,60元/年。腾讯云学生机,1C2G6M,108元/年,只有三次续费机会建议直接买一年。腾讯云每日秒杀,1核2G6M,99元/年(约8元/月),297元/3年。华为云,学生机1C1G1M,9元,24岁以下免学生认证;。2.国外服务器2.1 FranTech访问地址:https://my.frantech.ca/cart.php配置1GB DDR4 RAM1 CPU Core @ 3.9Ghz+20GB NVME Storage1 IPv4 + /48 IPv61000Mbit Unmetered BW价格:$3.50/月流量限制:无2.2 vultr访问地址:https://www.vultr.com/products/cloud-compute/配置1 CPU1 GB Memory1 TB Bandwidth1 IPv4 + /64 IPv6 Address价格:$5/月$0.007/小时流量限制:1T2.3 spartanhost(经常缺货)访问地址:https://spartanhost.org/vps配置512MB Memory25GB Disk Space1500GB Transfer @ 1Gb/s1 vCore Processor1 IPv4 + /64 IPv6 Address价格:$3/月流量限制:1T参考资料高性价比和便宜的VPS/云服务器推荐 2021/11/2更新
-
免费的webdav资源汇总-可用于vps硬盘扩容 厂家/提供方官网地址免费容量Webdav挂载地址Teracloudhttps://teracloud.jp/10G/20G(填邀请码XYPB6)https://seto.teracloud.jp/dav/4sharedhttp://www.4shared.com/15Ghttps://webdav.4shared.comBoxhttps://www.box.com/10Ghttps://dav.box.com/davDriveHQhttps://www.drivehq.com/5Ghttp://www.drivehq.com/webdav/XXXXXXiDriveSynchttps://www.idrivesync.com/5Ghttps://dav.idrivesync.com/zotero坚果云https://www.jianguoyun.com/流量限制https://dav.jianguoyun.com/dav/参考资料2020年还有哪些支持WebDAV的网盘?
-
暗通道先验去雾原理及实现 1.原理介绍1.1 大气散射模型为了表示雾对图像成像的影响,研究者提出了一个物理模型--大气散射模型,用其来表示雾霾等恶劣天气条件对图像造成的影响。该模型由McCartney首先提出,目前已经成为计算机视觉领域中朦胧图像生成过程的经典描述,该模型的数学表达式如下:$$ I(x)=J(x)t(x)+A(1-t(x)) $$其中:$I(x)$、$J(x)$分别表示有雾图像和对应的的无雾清晰图像,$A$表示全球大气光,$t(x)$是透射矩阵,描述的是光通过传输介质后没有被散射的部分,$t(x)$的数学表达式为:(其中,β指的是光的散射系数,d(x)指的是目标与摄象机之间的距离。)$$ t(x)=e^{-\beta d(x)} $$$J(x)t(x)$叫做直接衰减项,描述的是正常的清晰图像在透射媒介后发生衰减后保留下来的部分。可以看出,清晰图像会随着成像设备与物体的距离即$d(x)$的增加发生指数性衰减。$A(1-t(x))$部分称为大气遮罩层,表示的是全局大气光对成像的影响。因此,根据大气散射模型可知,要想恢复出清晰图像,需要解决两个问题:(1)准确的对全局大气光A进行估计求解,(2)准确的对透射矩阵t(x)进行求解。由上面的大气散射模型我们可以很容易得出除雾公式如下:$$ J(x)=\frac{I(x)-A(1-t(x))}{t(x)}=\frac{I(x)+t(x)}{t(x)}+A $$1.2 暗通道先验理论介绍暗通道先验理论为何凯明博士2009年在CVPR(IEEE Conference On Computer Version and Pattern Recogintion/IEEE计算视觉和模式识别会议)上所提出。该理论基于对大量无雾的户外图像的观察和统计,得出了大部分的户外无雾图像的每个局部区域都存在至少一个颜色通道的强度值很低,换言之,这个区域的各个像素点的颜色通道强度的最小值是个很小的数,其值约等于0,即在其暗通道图中表现为黑色。何凯明博士在其发表的暗通道先验除雾的论文中提出,对于任意的输入图像J,其暗通道Jdark可以用数学公式表达如下所示:$$ J^{dark}(x)=\min_{c\in{r,g,b}}[\min_{y\in{\Omega(x)}}(J^c(y))] $$式中$Ω(x)$则是一个正方形区域,该区域的中心是像素$x$,$J^c(x)$代表图像$J$的在某像素点的颜色强度。由公式可知,暗通道实际上图像的最小灰度图经过最小值滤波得到的。分别对无雾图像和有雾图像进行暗通道图的求解效果如图所示:1.3通过暗通道先验对大气光A和透射率t(x)进行估计由大气散射模型可知,若要对图像进行除雾,等价于现在的已经知道的$I(x)$,要求解出$J(x)$,显然这个方程有无数个解。因此就需要用到暗通道先验理论对透射率$t(x)$和大气光$A$进行估计了。首先完成的是对大气光$A$的估计,根据对何凯明博士发表的论文的理解,本文对大气光求解的具体步骤如下:将暗通道图和原图转化为[图片像素数量*通道数]的向量。求出暗通道图对于的向量中亮度前1/1000的向量索引。根据索引在原图转化得到的向量中寻找具有最高亮度的点的值,这就是A的估计值了。在完成大气$A$的求解后,便可以对$t(x)$的求解进行推导了。参考相关资料对$t(x)$的求解过程进行推导如下:首先将大气散射模型稍作变形得到如下式子:$$ \frac{I^c(x)}{A^c}=t(x)\frac{J^c(x)}{A^c}+1-t(x) $$为了对$t(x)$进行求解,先假设在每一个窗口内透射率$t(x)$为常数$\hat t(x)$,因为上面已经得到了$A$的估计值,所以在这里只需将$A$当做一个常量即可,对上式两边进行两次最小值运算,可以得到下式(i):$$ \min_{y \in \Omega(x)}(\min_{c \in \{r,g,b\}}(\frac{I^c(x)}{A^c})) =\hat t(x)\min_{y \in \Omega(x)}(\min_{c \in \{r,g,b\}}(\frac{J^c(x)}{A^c})) +1-\hat t(x) $$根据暗通道先验理论有:$$ J^{dark}(x)=min_{c\in{r,g,b}}[min_{y\in{\Omega(x)}}(J^c(y))] =0 $$因此,可以得出:$$ \min_{y \in \Omega(x)}(\min_{c \in \{r,g,b\}}(\frac{J^c(x)}{A^c})) =0 $$代入式(i)可得式(ii):$$ \hat t(x) = 1 - \min_{y \in \Omega(x)}(\min_{c \in \{r,g,b\}}(\frac{J^c(x)}{A^c})) $$到这就得到了透射图$t(x)$的估计结果。但是如果直接使用这一结果进行除雾效果有时产生的结果并不理想。因为空中总是会存在某些漂浮的小颗粒的,这使得我们看远处的东西会或多或少的受到雾的影响,此外,雾的存在还能让人更好的感受到物体的远近,因此,在去雾时需要考虑对一部分的雾进行保留。对雾的保留可以通过在式(ii)中引入一个在[0,1]之间的因子来实现,变化后得到的新的公式如下所示:$$ \hat t(x) = 1 - \omega\min_{y \in \Omega(x)}(min_{c \in \{r,g,b\}}(\frac{J^c(x)}{A^c})) $$根据何凯明博士的论文及进行了几次测试,最终本文选定的$\omega$的值为0.95。本文对复现实验中对$t(x)$进行求解过程及效果图如下图所示:1.4 根据大气光A和透射率t(x)的估计结果进行图像去雾到这里,我们就可以根据雾天图片退化模型进行清晰图像的恢复了。又因为当像素点x对应的透射图的$t(x)$很小时,会导致根据公式$$ J(x)=\frac{I(x)+t(x)}{t(x)}+A $$求解出的$J(x)$的值偏大,从而导致最终的得到的图片某些地方过曝,所以需要对其进行限制,本文选择限制的最大取值为$t_0=0.1$。从而的到最终使用的图像去雾公式为:$$ J(x)=\frac{I(x)+t(x)}{max(t(x),t_0)}+A $$2.代码实现2.0绘图辅助函数import matplotlib.pyplot as plt #显示单个图 def show_img_by_plt(img,title): plt.figure(figsize=(20,10)) #初始化画布 plt.axis('off') # 关掉坐标轴 plt.imshow(img) #显示图片 plt.title(title,y=-0.1) # 设置图像title plt.show() #show #通过subplot同时显示2个图 def show_double_img_by_subplot(img1,title1,img2,title2): plt.figure(figsize=(20,10)) #初始化画布 #第1个位置创建一个小图 plt.subplot(1,2,1)#表示将整个图像窗口分为1行2列, 当前位置为1 plt.axis('off') # 关掉坐标轴 plt.title(title1,y=-0.1) plt.imshow(img1) #第2个位置创建一个小图 plt.subplot(1,2,2)#表示将整个图像窗口分为1行2列, 当前位置为2 plt.axis('off') # 关掉坐标轴 plt.title(title2,y=-0.1) plt.imshow(img2) plt.show() #show #通过subplot同时显示2个图 #同时显示三个图 def show_three_img_by_subplot(img1,title1,img2,title2,img3,title3): plt.figure(figsize=(16,8)) #初始化画布 #第1个位置创建一个小图 plt.subplot(1,3,1)#表示将整个图像窗口分为1行2列, 当前位置为1 plt.axis('off') # 关掉坐标轴 plt.title(title1,y=-0.1) plt.imshow(img1) #第2个位置创建一个小图 plt.subplot(1,3,2)#表示将整个图像窗口分为1行2列, 当前位置为2 plt.axis('off') # 关掉坐标轴 plt.title(title2,y=-0.1) plt.imshow(img2) #第3个位置创建一个小图 plt.subplot(1,3,3)#表示将整个图像窗口分为1行2列, 当前位置为2 plt.axis('off') # 关掉坐标轴 plt.title(title3,y=-0.1) plt.imshow(img3) plt.show() #show2.1 获取图片暗通道图# 核心函数 #暗通道实际上是在rgb三个通道中取最小值组成灰度图,然后再进行一个最小值滤波得到的。 def get_dark_channel_img(original_img, r=15): #原图rgb三个通道中取最小值组成灰度图 temp_img = np.min(original_img,2) #再进行一个最小值滤波 #最小值滤波用腐蚀来替代了,其实腐蚀就是最小值滤波,最大值滤波是膨胀 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (r,r)) """ cv2.getStructuringElement( ) 返回指定形状和尺寸的结构元素。 这个函数的第一个参数表示内核的形状,有三种形状可以选择。 矩形:MORPH_RECT; 交叉形:MORPH_CROSS; 椭圆形:MORPH_ELLIPSE; (r,r)表示kernel的size """ dst_img = cv2.erode(temp_img, kernel) """ dst = cv.dilate(temp_img, kerne) 对图片进行腐蚀 参数说明: dst_img 输出与输入相同大小和类型的图像. kernel 用于侵蚀的结构元素可以使用getStructuringElement来创建结构元素。 """ return dst_img #返回最终暗通道图#调用测试 import imageio import numpy as np import cv2 img_src="./image/get_dark_channel_img_clear.jpg" original_img = imageio.imread(img_src) dark_channel_img=get_dark_channel_img(original_img) show_double_img_by_subplot(original_img,"original_img",dark_channel_img,"dark_channel_img")2.2根据暗通道图和原图估计大气光#核心函数 """ 1.从暗通道图按照亮度的大小取前0.1%的像素。 2.在这些位置中,在原始有雾图像I中寻找对应的具有最高亮度的点的值,作为A值。 """ def estimate_A(original_img,dark_channel_img): #计算图片的像素总数 img_h,img_w,img_c_num = original_img.shape img_size = img_h*img_w #计算暗通道图的像素值较大的0.1%的像素的数量 num_px = int(max(math.floor(img_size/1000),1)) #将暗通道图变为列向量 dark_vec = dark_channel_img.reshape(img_size,1); #将图片变为列向量 img_vec = original_img.reshape(img_size,3); #将暗通道图对应的列向量进行排序并返回从小到大的数组索引--argsort函数返回的是数组值从小到大的索引值 indices = np.argsort(dark_vec, axis=0) #取暗通道图像素较大的0.1%的像素的索引 indices = indices[img_size-num_px::] #将原图对应的 暗通道图的像素值排前0.1% 的像素点的像素值进行求平均 A = np.max(img_vec[indices]) return A#调用测试 import imageio import numpy as np import cv2 import math # img_src=str(input("请输入原图的地址:")) img_src="./image/haze_image.jpg" original_img = imageio.imread(img_src)/255 dark_channel_img=get_dark_channel_img(original_img) A = estimate_A(original_img,dark_channel_img)2.3根据原图和大气光A进行投射图t(x)的估计#核心函数 #根据论文中透射图的估计公式进行书写的 def estimate_transmission(original_img,A, omega = 0.95): min_min_Ic_div_Ac = np.zeros(original_img.shape,"float64"); for index in range(0,3): min_min_Ic_div_Ac[:,:,index] = original_img[:,:,index]/A transmission = 1 - omega*get_dark_channel_img(min_min_Ic_div_Ac); return transmission#调用测试 import imageio import numpy as np import cv2 # img_src=str(input("请输入原图的地址:")) img_src="./image/haze_image.jpg" original_img = imageio.imread(img_src) dark_channel_img=get_dark_channel_img(original_img) A = estimate_A(original_img,dark_channel_img) transmission = estimate_transmission(original_img,A) show_double_img_by_subplot(original_img,"original_img",transmission,"transmission")2.4根据估计好的大气光和透射图进行图片恢复#核心函数 def recover_haze_by_dark_channel_prior(haze_img,t_max = 0.1): dark_channel_img=get_dark_channel_img(haze_img) A = estimate_A(haze_img,dark_channel_img) transmission = estimate_transmission(haze_img,A) clear_img = np.empty(haze_img.shape,haze_img.dtype); for index in range(0,3): clear_img[:,:,index] = (haze_img[:,:,index]-A[index])/cv2.max(transmission,t_max) + A[index] return clear_img#调用测试 import imageio import numpy as np # haze_img_src=str(input("请输入有雾图片的地址:")) haze_img_src="./image/haze_image1.jpg" haze_img = imageio.imread(haze_img_src) clear_img = recover_haze_by_dark_channel_prior(haze_img) show_double_img_by_subplot(haze_img,"haze_img",clear_img,"clear_img") transmission = estimate_transmission(haze_img,A) show_three_img_by_subplot(haze_img,"haze_img",clear_img,"clear_img",transmission,"transmission")3.暗通道先验图片去雾汇总import imageio import numpy as np import cv2 import math def get_dark_channel_img(original_img, r=6): #原图rgb三个通道中取最小值组成灰度图 temp_img = np.min(original_img,2) #再进行一个最小值滤波 #最小值滤波用腐蚀来替代了,其实腐蚀就是最小值滤波,最大值滤波是膨胀 kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (r,r)) dst_img = cv2.erode(temp_img, kernel) return dst_img #返回最终暗通道图 def estimate_A(original_img,dark_channel_img): #计算图片的像素总数 img_h,img_w,img_c_num = original_img.shape img_size = img_h*img_w #计算暗通道图的像素值较大的0.1%的像素的数量 num_px = int(max(math.floor(img_size/1000),1)) #将暗通道图变为列向量 dark_vec = dark_channel_img.reshape(img_size,1); #将图片变为列向量 img_vec = original_img.reshape(img_size,3); #将暗通道图对应的列向量进行排序并返回从小到大的数组索引--argsort函数返回的是数组值从小到大的索引值 indices = np.argsort(dark_vec, axis=0) #取暗通道图像素较大的0.1%的像素的索引 indices = indices[img_size-num_px::] #将原图对应的 暗通道图的像素值排前0.1% 的像素点的像素值进行求平均 atm_sum = np.zeros([1,3]) for index in range(1,num_px): atm_sum = atm_sum + img_vec[indices[index]] A = atm_sum / num_px; return A[0] def estimate_transmission(original_img,A, omega = 0.95): min_min_Ic_div_Ac = np.zeros(original_img.shape,"float64"); for index in range(0,3): min_min_Ic_div_Ac[:,:,index] = original_img[:,:,index]/A[index] transmission = 1 - omega*get_dark_channel_img(min_min_Ic_div_Ac); return transmission def recover_haze_by_dark_channel_prior(haze_img,t_max = 0.1): dark_channel_img=get_dark_channel_img(haze_img) A = estimate_A(haze_img,dark_channel_img) transmission = estimate_transmission(haze_img,A) clear_img = np.empty(haze_img.shape,haze_img.dtype); for index in range(0,3): clear_img[:,:,index] = (haze_img[:,:,index]-A[index])/cv2.max(transmission,t_max) + A[index] return clear_img haze_img_src="./image/haze_image.jpg" haze_img = imageio.imread(haze_img_src) clear_img = recover_haze_by_dark_channel_prior(haze_img) show_double_img_by_subplot(haze_img,"haze_img",clear_img,"clear_img")应用与视频from moviepy.editor import VideoFileClip def process_image(image): return deHaze(image/255.0)*255 output_file = './vedio/clear_dark_channel_short.mp4' test_clip = VideoFileClip("./vedio/haze_short.mp4") new_clip = test_clip.fl_image(process_image) new_clip.write_videofile(output_file, audio=False)参考资料暗通道先验原理——DCP去雾算法He K , Sun J , Fellow, et al. Single Image Haze Removal Using Dark Channel Prior[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2011, 33(12):2341-2353.
-
Python通过opencv实现视频和图像互转 1.视频转图片import cv2 import numpy import math cap = cv2.VideoCapture("./帯広空港.mp4") vedio_frame_count = cap.get(7) # 获取视频总帧数 vedio_fps = math.ceil(cap.get(5)) # 获取视频帧率 frame_width = cap.get(3) # 获取视频帧宽度 frame_height = cap.get(4) # 获取视频帧高度 print(vedio_frame_count,vedio_fps) frame_id = 1 while(True): ret, frame = cap.read() if not ret or cv2.waitKey(30)==ord('q'): break; cv2.imshow("frame",frame) frame_id += 1 cap.release() cv2.destroyAllWindows()opencv参数列表0 CV_CAP_PROP_POS_MSEC Current position of the video file in milliseconds or video capture timestamp. 1 CV_CAP_PROP_POS_FRAMES 0-based index of the frame to be decoded/captured next. 2 CV_CAP_PROP_POS_AVI_RATIO Relative position of the video file: 0 - start of the film, 1 - end of the film. 3 CV_CAP_PROP_FRAME_WIDTH #视频帧宽度 4 CV_CAP_PROP_FRAME_HEIGHT #视频帧高度 5 CV_CAP_PROP_FPS #视频帧速率 6 CV_CAP_PROP_FOURCC 4-character code of codec. 7 CV_CAP_PROP_FRAME_COUNT #视频总帧数 8 CV_CAP_PROP_FORMAT Format of the Mat objects returned by retrieve() . 9 CV_CAP_PROP_MODE Backend-specific value indicating the current capture mode. 10 CV_CAP_PROP_BRIGHTNESS Brightness of the image (only for cameras). 11 CV_CAP_PROP_CONTRAST Contrast of the image (only for cameras). 12 CV_CAP_PROP_SATURATION Saturation of the image (only for cameras). 13 CV_CAP_PROP_HUE Hue of the image (only for cameras). 14 CV_CAP_PROP_GAIN Gain of the image (only for cameras). 15 CV_CAP_PROP_EXPOSURE Exposure (only for cameras). 16 CV_CAP_PROP_CONVERT_RGB Boolean flags indicating whether images should be converted to RGB. 17 CV_CAP_PROP_WHITE_BALANCE_U The U value of the whitebalance setting (note: only supported by DC1394 v 2.x backend currently) 18 CV_CAP_PROP_WHITE_BALANCE_V The V value of the whitebalance setting (note: only supported by DC1394 v 2.x backend currently) 19 CV_CAP_PROP_RECTIFICATION Rectification flag for stereo cameras (note: only supported by DC1394 v 2.x backend currently) 20 CV_CAP_PROP_ISO_SPEED The ISO speed of the camera (note: only supported by DC1394 v 2.x backend currently) 21 CV_CAP_PROP_BUFFERSIZE Amount of frames stored in internal buffer memory (note: only supported by DC1394 v 2.x backend currently)2.图片转视频# 图片转视频 import cv2 import os img_dir = "./data_handle/img/" # 必须保证图片是相同大小的,否则会转换失败 img_list = os.listdir(img_dir) frame_rate = 30 # 帧率 frame_shape = cv2.imread(os.path.join(img_dir,img_list[0])).shape[:-1] # 图片大小/帧shape frame_shape = (frame_shape[1],frame_shape[0]) # 交换w和h videoWriter = cv2.VideoWriter('result.mp4', cv2.VideoWriter_fourcc(*'MJPG'), frame_rate, frame_shape) # 初始化视频帧writer # 开始逐帧写入视频帧 frame_id = 1 for img_filename in img_list: img_path = os.path.join(img_dir,img_filename) img = cv2.imread(img_path) videoWriter.write(img) frame_id += 1 if frame_id%100 == 0: break videoWriter.release() 参考资料OpenCV|图片与视频的相互转换(C++&Python)python3 opencv获取视频的总帧数介绍
-
[TeraCloud] 免费获取20GB的WebDAV--vps硬盘扩容 1.注册TeraCLOUD得10GBTeraCloud是一家日本的WebDAV商,目前有活动,你可以免费获得20GB的WebDAV空间,可以说是非常超值了。注册链接:https://account.teracloud.jp/RegistForm.php/index/。注册完成然后就可以登陆进个人中心了,并且获得了10GB的WebDAV空间。2.填写邀请码获取赠送的10GB首先进入个人中心 https://teracloud.jp/ja/modules/mypage/usage/拉到下方“紹介ボーナス情報”。把邀请码XYPB6填进去然后猛戳“コード適用”,邀请方和被邀请方都能获得10GB空间,互利共赢。需要注意的是,如果您使用的是免费帐户,并且连续超过90天未登录,则TeraCLOUD上的帐户和数据将被删除,所以一定要记得每过一段时间就登录一次哦!3.使用web进行文件管理访问地址:https://seto.teracloud.jp/browser/4.开启并使用webdav挂载首先进入个人中心 https://teracloud.jp/ja/modules/mypage/usage/点击Turn on Apps Connection。首次开启会显示webdav的连接密码,注意保存。然后使用对应的信息即可进行webdav的挂载使用。上述结果实例webdav地址:https://seto.teracloud.jp/dav/ username:jupiteradam password:uiVRoXQ9JdrqCykz
-
Linux挂载WebDAV 1.webdav介绍基于Web的分布式编写和版本控制(WebDAV)是超文本传输协议(HTTP)的扩展,有利于用户间协同编辑和管理存储在万维网服务器文档。WebDAV由互联网工程任务组的工作组在RFC 4918中定义。WebDAV协议为用户在服务器上创建、更改和移动文档提供了一个框架。WebDAV协议最重要的功能包括维护作者或修改日期的属性、名字空间管理、集合和覆盖保护。维护属性包括创建、删除和查询文件信息等。名字空间管理处理在服务器名称空间内复制和移动网页的能力。集合(Collections)处理各种资源的创建、删除和列举。覆盖保护处理与锁定文件相关的方面。2.软件安装与挂载davfs2安装# Centos & Fedora & RedHat yum -y install davfs2 # 其他的比如Ubuntu之类的 apt-get -y install davfs2安装完davfs2之后执行sed -i 's/# use_locks 1/use_locks 0/g' /etc/davfs2/davfs2.conf echo "你的WebDAV地址 用户名 密码" >> /etc/davfs2/secrets #保存用户名密码,以后可以直接免密码挂载 mount.davfs 你的WebDAV地址 你想要挂载到的目录 #即可成功挂载注意1:挂载目录必须提前创建好!注意2:如果你不执行第二句保存用户名密码,那么你以后挂载的时候都会要求输入用户名密码!示例sed -i 's/# use_locks 1/use_locks 0/g' /etc/davfs2/davfs2.conf echo "https://seto.teracloud.jp/dav/ jupiteradam hrxjKbiszNm9Bi" >> /etc/davfs2/secrets #保存用户名密码,以后可以直接免密码挂载 mount.davfs https://seto.teracloud.jp/dav/ /drive 3. 开机自动挂载如果想要开机自动挂载,则再执行echo "mount.davfs 你的WebDAV地址 你想要挂载到的目录" >> /etc/rc.local执行完此句之后检查一下/etc/rc.local文件,看看是否有exit 0这句。如果有的话,要手动把上面命令添加进去的语句放到exit 0之前。参考资料https://zh.wikipedia.org/wiki/WebDAV如何在各个平台下挂载WebDAV
-
Linux测试CPU 整型算力和浮点数算力 Linux测试CPU 整型算力和浮点数算力1.sysbench:用于测试 CPU 整型算力1.0 介绍SysBench是一个模块化的、跨平台、多线程基准测试工具,主要用于评估测试各种不同系统参数下的数据库负载情况。它主要包括以下几种方式的测试:cpu性能磁盘io性能调度程序性能内存分配及传输速度POSIX线程性能数据库性能(OLTP基准测试)目前sysbench主要支持 MySQL,pgsql,Oracle 这3种数据库。1.1 安装依赖# 安装依赖-centerOS sudo yum install automake libtool gcc -y # 安装依赖-ubuntu sudo apt install automake libtool gcc -y1.2 下载并编译安装# 下载sysbench源码包 wget https://github.com/akopytov/sysbench/archive/1.0.20.tar.gz -O sysbench-1.0.20.tar.gz # 解压 tar -xvf sysbench-1.0.20.tar.gz # 执行autogen.sh cd sysbench-1.0.20 sh autogen.sh # 生成Makefile ./configure --without-mysql # 编译并安装 sudo make && sudo make install # 查看安装结果(版本信息) sysbench --version1.3 调用测试测试 4 线程,20000 内的质数计算能力(base) jupiter@dell:/software/sysbench-1.0.20$ sysbench cpu --cpu-max-prime=20000 --threads=4 --time=60 run # 参数解释 --cpu-max-prime=20000 测试计算素数直到某个最大值(20000)所需要的时间 --threads=4 使用线程数为4 --time=60 重复次数为60次测试结果/Score : 1497.06sysbench 1.0.20 (using bundled LuaJIT 2.1.0-beta2) Running the test with following options: Number of threads: 4 Initializing random number generator from current time Prime numbers limit: 20000 Initializing worker threads... Threads started! CPU speed: events per second: 1497.06 General statistics: total time: 60.0026s total number of events: 89830 Latency (ms): min: 2.52 avg: 2.67 max: 22.63 95th percentile: 2.76 sum: 239972.33 Threads fairness: events (avg/stddev): 22457.5000/42.39 execution time (avg/stddev): 59.9931/0.002.sysbench:用于测试 CPU 浮点型算力2.1 安装依赖# 安装依赖-centerOS sudo yum install automake libtool gcc -y # 安装依赖-ubuntu sudo apt install automake libtool gcc -y2.2 下载并编译安装# 下载 wget http://soft.vpser.net/test/unixbench/unixbench-5.1.2.tar.gz # 解压 tar zxvf unixbench-5.1.2.tar.gz # 配置如果不需要进行图形测试或者不在图形化界面下测试,则将Makefile文件中GRAPHIC_TEST = defined注释掉 cd unixbench-5.1.2 make # 安装依赖 sudo apt install -y perl # 执行测试 ./Run2.3 测试结果说明测试项目项目说明Dhrystone 2 using register variables测试 string handlingDouble-Precision Whetstone测试浮点数操作的速度和效率Execl Throughput此测试考察每秒钟可以执行的execI系统调用的次数File Copy 1024 bufsize 2000 maxblocks测试从一个文件向另外一个文件传输数据的速率。File Copy 256 bufsize 500 maxblocks测试从一个文件向另外一个文件传输数据的速率。File Read 4096 bufsize 8000 maxblocks测试从一个文件向另外一个文件传输数据的速率。Pipe-based Context Switching测试两个进程(每秒钟)通过一个管道交换一个不断增 长的整数的次数。Pipe Throughput一秒钟内一个进程可以向一个管道写512字节数据然后 再读回的次数Process Creation测试每秒钟一个进程可以创建子进程然后收回子进程的 次数(子进程一定立即退出)。Shell Scripts (8 concurrent)测试一秒钟内一个进程可以并发地开始一个shell脚本 的n个拷贝的次数,n一般取值1,2,4,8.System Call Overhead测试进入和离开操作系统内核的代价,即一次系统调用 的代价。2.4 测试结果简略摘要# 单核双精度浮点算力 Double-Precision Whetstone 5476.7 MWIPS # 4核双精度浮点算力 Double-Precision Whetstone 21621.7 MWIPS详细信息======================================================================== BYTE UNIX Benchmarks (Version 5.1.2) System: dell: GNU/Linux OS: GNU/Linux -- 5.11.0-40-generic -- #44~20.04.2-Ubuntu SMP Tue Oct 26 18:07:44 UTC 2021 Machine: x86_64 (x86_64) Language: en_US.utf8 (charmap="UTF-8", collate="UTF-8") CPU 0: Intel(R) Core(TM) i5-6300HQ CPU @ 2.30GHz (4599.9 bogomips) Hyper-Threading, x86-64, MMX, Physical Address Ext, SYSENTER/SYSEXIT, SYSCALL/SYSRET, Intel virtualization CPU 1: Intel(R) Core(TM) i5-6300HQ CPU @ 2.30GHz (4599.9 bogomips) Hyper-Threading, x86-64, MMX, Physical Address Ext, SYSENTER/SYSEXIT, SYSCALL/SYSRET, Intel virtualization CPU 2: Intel(R) Core(TM) i5-6300HQ CPU @ 2.30GHz (4599.9 bogomips) Hyper-Threading, x86-64, MMX, Physical Address Ext, SYSENTER/SYSEXIT, SYSCALL/SYSRET, Intel virtualization CPU 3: Intel(R) Core(TM) i5-6300HQ CPU @ 2.30GHz (4599.9 bogomips) Hyper-Threading, x86-64, MMX, Physical Address Ext, SYSENTER/SYSEXIT, SYSCALL/SYSRET, Intel virtualization 19:40:36 up 11 days, 9:27, 3 users, load average: 0.18, 0.34, 0.47; runlevel 5 ------------------------------------------------------------------------ Benchmark Run: 一 11月 29 2021 19:40:36 - 20:08:45 4 CPUs in system; running 1 parallel copy of tests Dhrystone 2 using register variables 35459584.6 lps (10.0 s, 7 samples) Double-Precision Whetstone 5476.7 MWIPS (9.9 s, 7 samples) Execl Throughput 3206.9 lps (29.9 s, 2 samples) File Copy 1024 bufsize 2000 maxblocks 527819.0 KBps (30.0 s, 2 samples) File Copy 256 bufsize 500 maxblocks 137340.3 KBps (30.0 s, 2 samples) File Copy 4096 bufsize 8000 maxblocks 1512668.7 KBps (30.0 s, 2 samples) Pipe Throughput 710906.8 lps (10.0 s, 7 samples) Pipe-based Context Switching 151493.2 lps (10.0 s, 7 samples) Process Creation 6097.0 lps (30.0 s, 2 samples) Shell Scripts (1 concurrent) 6869.6 lpm (60.0 s, 2 samples) Shell Scripts (8 concurrent) 2230.7 lpm (60.0 s, 2 samples) System Call Overhead 400377.9 lps (10.0 s, 7 samples) System Benchmarks Index Values BASELINE RESULT INDEX Dhrystone 2 using register variables 116700.0 35459584.6 3038.5 Double-Precision Whetstone 55.0 5476.7 995.8 Execl Throughput 43.0 3206.9 745.8 File Copy 1024 bufsize 2000 maxblocks 3960.0 527819.0 1332.9 File Copy 256 bufsize 500 maxblocks 1655.0 137340.3 829.9 File Copy 4096 bufsize 8000 maxblocks 5800.0 1512668.7 2608.0 Pipe Throughput 12440.0 710906.8 571.5 Pipe-based Context Switching 4000.0 151493.2 378.7 Process Creation 126.0 6097.0 483.9 Shell Scripts (1 concurrent) 42.4 6869.6 1620.2 Shell Scripts (8 concurrent) 6.0 2230.7 3717.8 System Call Overhead 15000.0 400377.9 266.9 ======== System Benchmarks Index Score 1007.7 ------------------------------------------------------------------------ Benchmark Run: 一 11月 29 2021 20:08:45 - 20:36:59 4 CPUs in system; running 4 parallel copies of tests Dhrystone 2 using register variables 136159740.8 lps (10.0 s, 7 samples) Double-Precision Whetstone 21621.7 MWIPS (9.9 s, 7 samples) Execl Throughput 10934.3 lps (29.9 s, 2 samples) File Copy 1024 bufsize 2000 maxblocks 1144908.0 KBps (30.0 s, 2 samples) File Copy 256 bufsize 500 maxblocks 300291.5 KBps (30.0 s, 2 samples) File Copy 4096 bufsize 8000 maxblocks 3433079.5 KBps (30.0 s, 2 samples) Pipe Throughput 2704214.4 lps (10.0 s, 7 samples) Pipe-based Context Switching 565815.4 lps (10.0 s, 7 samples) Process Creation 31990.1 lps (30.0 s, 2 samples) Shell Scripts (1 concurrent) 17826.7 lpm (60.0 s, 2 samples) Shell Scripts (8 concurrent) 2525.2 lpm (60.1 s, 2 samples) System Call Overhead 1474932.5 lps (10.0 s, 7 samples) System Benchmarks Index Values BASELINE RESULT INDEX Dhrystone 2 using register variables 116700.0 136159740.8 11667.5 Double-Precision Whetstone 55.0 21621.7 3931.2 Execl Throughput 43.0 10934.3 2542.9 File Copy 1024 bufsize 2000 maxblocks 3960.0 1144908.0 2891.2 File Copy 256 bufsize 500 maxblocks 1655.0 300291.5 1814.5 File Copy 4096 bufsize 8000 maxblocks 5800.0 3433079.5 5919.1 Pipe Throughput 12440.0 2704214.4 2173.8 Pipe-based Context Switching 4000.0 565815.4 1414.5 Process Creation 126.0 31990.1 2538.9 Shell Scripts (1 concurrent) 42.4 17826.7 4204.4 Shell Scripts (8 concurrent) 6.0 2525.2 4208.6 System Call Overhead 15000.0 1474932.5 983.3 ======== System Benchmarks Index Score 2980.8参考资料sysbench压力测试工具安装和参数介绍UnixBench 测试工具简单使用ARM和X86云服务器的算力对比
-
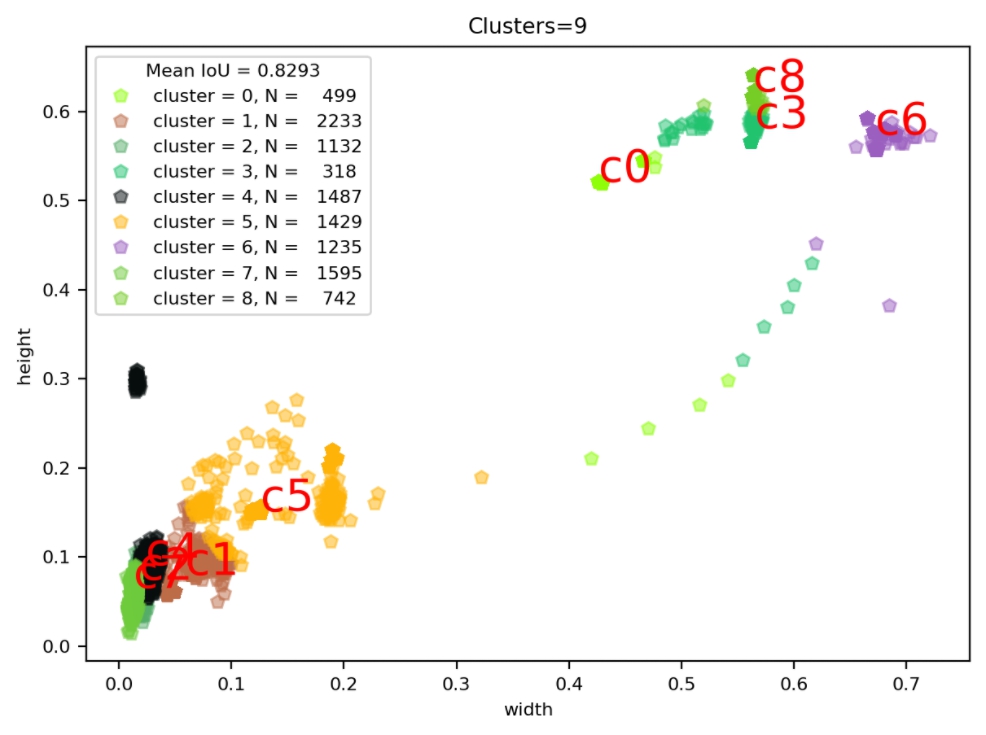
VOC数据集的Anchor聚类--Kmeans算法实现 1.K-means算法具体介绍参考:Kmeans算法简介k-means聚类的算法运行过程:(1)选择k个初始聚类中心 (2)计算每个对象与这k个中心各自的距离,按照最小距离原则分配到最邻近聚类 (3)使用每个聚类中的样本均值作为新的聚类中心 (4)重复步骤(2)和(3)直到聚类中心不再变化 (5)结束,得到k个聚类2.算法实现2.1数据加载函数封装# STEP1:加载数据集,获取所有box的width、height import os from progressbar import * import xmltodict import numpy as np def load_dataset(data_root): xml_dir= os.path.join(data_root,"Annotations") #xml文件路径(Annotations) width_height_list = [] #用于存储统计结果 #进度条功能 widgets = ['box width_height 统计: ',Percentage(), ' ', Bar('#'),' ', Timer(),' ', ETA()] pbar = ProgressBar(widgets=widgets, maxval=len(os.listdir(xml_dir))).start() count = 0 for xml_file in os.listdir(xml_dir): # 拼接xml文件的path xml_file_path = os.path.join(xml_dir,xml_file) # 读取xml文件到字符串 with open(xml_file_path) as f: xml_str = f.read() # xml字符串转为字典 xml_dic = xmltodict.parse(xml_str) # 获取图片的width、height img_width = float(xml_dic["annotation"]["size"]["width"]) img_height = float(xml_dic["annotation"]["size"]["height"]) # 获取xml文件中的所有objects obj_list = [] objects = xml_dic["annotation"]["object"] if isinstance(objects,list): # xml文件中包含多个object for obj in objects: obj_list.append(obj) else: # xml文件中包含1个object obj_list.append(objects) #print(obj_list) # width_height布统计 for obj in obj_list: #box 的height\width归一化 box_width = (float(obj['bndbox']["xmax"]) - float(obj['bndbox']["xmin"]))/img_width box_height = (float(obj['bndbox']["ymax"]) - float(obj['bndbox']["ymin"]))/img_height width_height_list.append([box_width,box_height]) #更新进度条 count += 1 pbar.update(count) #释放进度条 pbar.finish()调用效果#输出统计结果信息 data_root = "/data/jupiter/project/dataset/209_VOC_new" width_height_list = load_dataset(data_root) width_height_np = np.array(width_height_list) print("clustering feature data is ready. shape = (N object, width and height) = {}".format(width_height_np.shape))box width_height 统计: 100% |###############| Elapsed Time: 0:00:35 Time: 0:00:35 clustering feature data is ready. shape = (N object, width and height) = (10670, 2)2.2 将未聚类前的统计结果绘图表示# 将未聚类前的统计结果绘图表示 import matplotlib.pyplot as plt plt.figure(figsize=(10,10)) plt.scatter(width_height_np[:,0],width_height_np[:,1],alpha=0.3) plt.title("Clusters",fontsize=20) plt.xlabel("normalized width",fontsize=20) plt.ylabel("normalized height",fontsize=20) plt.show()调用效果2.3 实现距离评估函数(这里用的是iou)这里iou的计算公式为:$$ \begin{array}{rl} IoU &= \frac{\textrm{intersection} }{ \textrm{union} - \textrm{intersection} }\\ \textrm{intersection} &= Min(w_1,w_2) Min(h_1,h_2)\\ \textrm{union} & = w_1 h_1 + w_2 h_2 \end{array} $$图示代码实现import numpy as np # 数据间距离评估函数 def iou(box, clusters): """ 计算一个ground truth边界盒和k个先验框(Anchor)的交并比(IOU)值。 参数box: 元组或者数据,代表ground truth的长宽。 参数clusters: 形如(k,2)的numpy数组,其中k是聚类Anchor框的个数 返回:ground truth和每个Anchor框的交并比。 """ x = np.minimum(clusters[:, 0], box[0]) y = np.minimum(clusters[:, 1], box[1]) if np.count_nonzero(x == 0) > 0 or np.count_nonzero(y == 0) > 0: raise ValueError("Box has no area") intersection = x * y box_area = box[0] * box[1] cluster_area = clusters[:, 0] * clusters[:, 1] iou_ = intersection / (box_area + cluster_area - intersection) return iou_2.4实现kmeans聚类函数# 实现kmeans聚类函数 def kmeans(boxes, k): """ 利用IOU值进行K-means聚类 参数boxes: 形状为(r, 2)的ground truth框,其中r是ground truth的个数 参数k: Anchor的个数 返回值:形状为(k, 2)的k个Anchor框 """ # 即是上面提到的r rows = boxes.shape[0] # 距离数组,计算每个ground truth和k个Anchor的距离 distances = np.empty((rows, k)) # 上一次每个ground truth"距离"最近的Anchor索引 last_clusters = np.zeros((rows,)) # 设置随机数种子 np.random.seed() # 初始化聚类中心,k个簇,从r个ground truth随机选k个 clusters = boxes[np.random.choice(rows, k, replace=False)] # 开始聚类 while True: # 计算每个ground truth和k个Anchor的距离,用1-IOU(box,anchor)来计算 for row in range(rows): distances[row] = 1 - iou(boxes[row], clusters) # 对每个ground truth,选取距离最小的那个Anchor,并存下索引 nearest_clusters = np.argmin(distances, axis=1) # 如果当前每个ground truth"距离"最近的Anchor索引和上一次一样,聚类结束 if (last_clusters == nearest_clusters).all(): break # 更新簇中心为簇里面所有的ground truth框的均值 for cluster in range(k): clusters[cluster] = np.median(boxes[nearest_clusters == cluster], axis=0) # 更新每个ground truth"距离"最近的Anchor索引 last_clusters = nearest_clusters return clusters,nearest_clusters2.4 调用测试CLUSTERS = 9 #聚类数量,anchor数量 INPUTDIM = 416 #输入网络大小 clusters_center_list,nearest_clusters = kmeans(width_height_np, k=CLUSTERS) clusters_center_list_handle = np.array(clusters_center_list)*INPUTDIM # 得到最终填入YOLOv3 的cfg文件中的anchor print('Boxes:') print(clusters_center_list_handle.astype(np.int32)) Boxes: [[ 9 37] [235 239] [ 4 30] [ 24 33] [ 5 21] [ 52 63] [ 5 26] [ 7 28] [ 6 33]]2.5聚类结果绘制与效果评估(mean_iou)查看数据聚类结果import seaborn as sns current_palette = list(sns.xkcd_rgb.values()) def plot_cluster_result(plt,clusters,nearest_clusters,mean_iou,width_height_np,k): for icluster in np.unique(nearest_clusters): pick = nearest_clusters==icluster c = current_palette[icluster] plt.rc('font', size=8) plt.plot(width_height_np[pick,0],width_height_np[pick,1],"p", color=c, alpha=0.5,label="cluster = {}, N = {:6.0f}".format(icluster,np.sum(pick))) plt.text(clusters[icluster,0], clusters[icluster,1], "c{}".format(icluster), fontsize=20,color="red") plt.title("Clusters=%d" %k) plt.xlabel("width") plt.ylabel("height") plt.legend(title="Mean IoU = {:5.4f}".format(mean_iou)) # achor结果评估 def avg_iou(boxes, clusters): """ 计算一个ground truth和k个Anchor的交并比的均值。 """ return np.mean([np.max(iou(boxes[i], clusters)) for i in range(boxes.shape[0])]) figsize = (7,5) plt.figure(figsize=figsize) mean_iou = avg_iou(width_height_np, out) plot_cluster_result(plt,clusters_center_list,nearest_clusters,mean_iou,width_height_np,k=CLUSTERS)运行效果查看聚类中心分布w = width_height_np[:, 0].tolist() h = width_height_np[:, 1].tolist() centroid_w=clusters_center_list[:,0].tolist() centroid_h=clusters_center_list[:,1].tolist() plt.figure(dpi=200) plt.title("kmeans") plt.scatter(w, h, s=10, color='b') plt.scatter(centroid_w,centroid_h,s=10,color='r') plt.show()运行效果3.汇总简略版#coding=utf-8 import xml.etree.ElementTree as ET import numpy as np import glob def iou(box, clusters): """ 计算一个ground truth边界盒和k个先验框(Anchor)的交并比(IOU)值。 参数box: 元组或者数据,代表ground truth的长宽。 参数clusters: 形如(k,2)的numpy数组,其中k是聚类Anchor框的个数 返回:ground truth和每个Anchor框的交并比。 """ x = np.minimum(clusters[:, 0], box[0]) y = np.minimum(clusters[:, 1], box[1]) if np.count_nonzero(x == 0) > 0 or np.count_nonzero(y == 0) > 0: raise ValueError("Box has no area") intersection = x * y box_area = box[0] * box[1] cluster_area = clusters[:, 0] * clusters[:, 1] iou_ = intersection / (box_area + cluster_area - intersection) return iou_ def avg_iou(boxes, clusters): """ 计算一个ground truth和k个Anchor的交并比的均值。 """ return np.mean([np.max(iou(boxes[i], clusters)) for i in range(boxes.shape[0])]) def kmeans(boxes, k): """ 利用IOU值进行K-means聚类 参数boxes: 形状为(r, 2)的ground truth框,其中r是ground truth的个数 参数k: Anchor的个数 参数dist: 距离函数 返回值:形状为(k, 2)的k个Anchor框 """ # 即是上面提到的r rows = boxes.shape[0] # 距离数组,计算每个ground truth和k个Anchor的距离 distances = np.empty((rows, k)) # 上一次每个ground truth"距离"最近的Anchor索引 last_clusters = np.zeros((rows,)) # 设置随机数种子 np.random.seed() # 初始化聚类中心,k个簇,从r个ground truth随机选k个 clusters = boxes[np.random.choice(rows, k, replace=False)] # 开始聚类 while True: # 计算每个ground truth和k个Anchor的距离,用1-IOU(box,anchor)来计算 for row in range(rows): distances[row] = 1 - iou(boxes[row], clusters) # 对每个ground truth,选取距离最小的那个Anchor,并存下索引 nearest_clusters = np.argmin(distances, axis=1) # 如果当前每个ground truth"距离"最近的Anchor索引和上一次一样,聚类结束 if (last_clusters == nearest_clusters).all(): break # 更新簇中心为簇里面所有的ground truth框的均值 for cluster in range(k): clusters[cluster] = np.median(boxes[nearest_clusters == cluster], axis=0) # 更新每个ground truth"距离"最近的Anchor索引 last_clusters = nearest_clusters return clusters # 加载自己的数据集,只需要所有labelimg标注出来的xml文件即可 def load_dataset(path): dataset = [] for xml_file in glob.glob("{}/*xml".format(path)): tree = ET.parse(xml_file) # 图片高度 height = int(tree.findtext("./size/height")) # 图片宽度 width = int(tree.findtext("./size/width")) for obj in tree.iter("object"): # 偏移量 xmin = int(obj.findtext("bndbox/xmin")) / width ymin = int(obj.findtext("bndbox/ymin")) / height xmax = int(obj.findtext("bndbox/xmax")) / width ymax = int(obj.findtext("bndbox/ymax")) / height xmin = np.float64(xmin) ymin = np.float64(ymin) xmax = np.float64(xmax) ymax = np.float64(ymax) if xmax == xmin or ymax == ymin: print(xml_file) # 将Anchor的长宽放入dateset,运行kmeans获得Anchor dataset.append([xmax - xmin, ymax - ymin]) return np.array(dataset) ANNOTATIONS_PATH = "/data/jupiter/project/dataset/209_VOC_new/Annotations" #xml文件所在文件夹 CLUSTERS = 9 #聚类数量,anchor数量 INPUTDIM = 416 #输入网络大小 data = load_dataset(ANNOTATIONS_PATH) out = kmeans(data, k=CLUSTERS) print('Boxes:') out_handle = np.array(out)*INPUTDIM print(out_handle.astype(np.int32)) print("Accuracy: {:.2f}%".format(avg_iou(data, out) * 100)) final_anchors = np.around(out[:, 0] / out[:, 1], decimals=2).tolist() print("Before Sort Ratios:\n {}".format(final_anchors)) print("After Sort Ratios:\n {}".format(sorted(final_anchors)))Boxes: [[ 8 34] [234 256] [279 239] [ 52 63] [ 6 28] [ 5 26] [ 24 33] [ 10 37] [177 216]] Accuracy: 82.93% Before Sort Ratios: [0.24, 0.92, 1.17, 0.83, 0.23, 0.19, 0.74, 0.28, 0.82] After Sort Ratios: [0.19, 0.23, 0.24, 0.28, 0.74, 0.82, 0.83, 0.92, 1.17]参考资料YOLOv3使用自己数据集——Kmeans聚类计算anchor boxes目标检测算法之YOLO系列算法的Anchor聚类
-
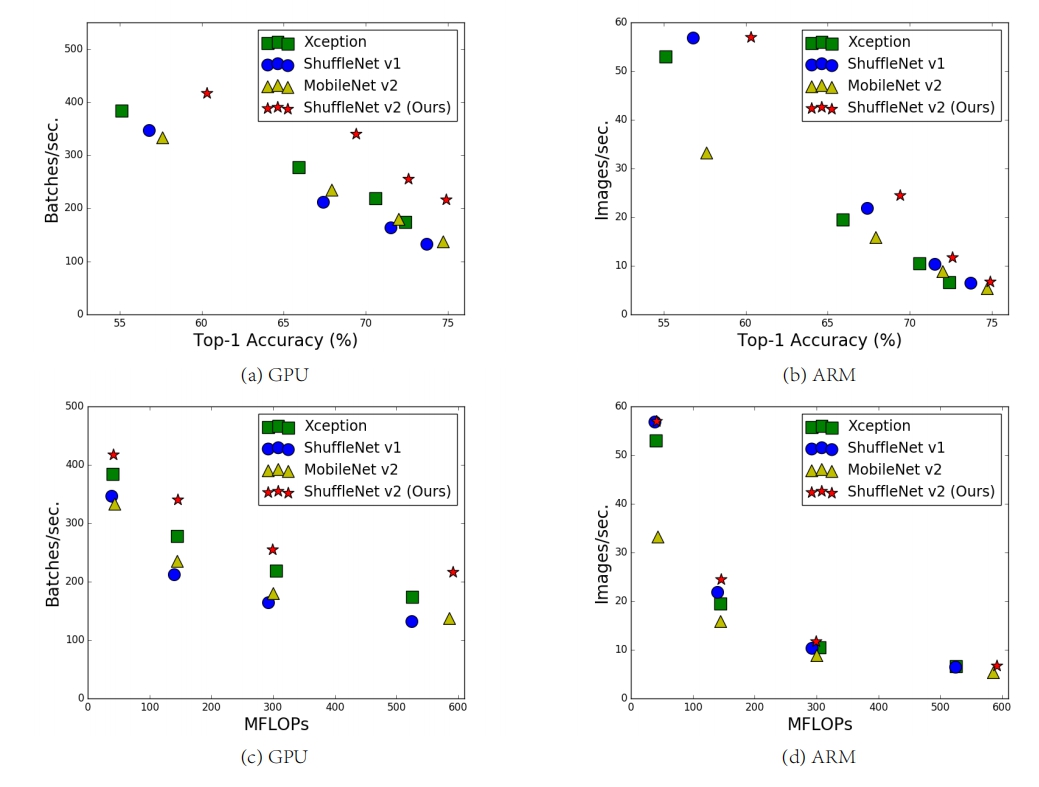
ShuffleNet-v2简介与实现 1.原论文ECCV2018--ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design2.设计理念目前衡量模型复杂度的一个通用指标是FLOPs,具体指的是multiply-add数量,但是这却是一个间接指标,因为它不完全等同于速度。如图1中的(c)和(d)可以看到相同FLOPs的两个模型,其速度却存在差异。这种不一致主要归结为两个原因,首先影响速度的不仅仅是FLOPs,如内存使用量(memory access cost, MAC),这不能忽略,对于GPUs来说可能会是瓶颈。另外模型的并行程度也影响速度,并行度高的模型速度相对更快。另外一个原因,模型在不同平台上的运行速度是有差异的,如GPU和ARM,而且采用不同的库也会有影响。3.根据设计理念及实验得出的4条基本设计准则3.1探索实验据此,作者在特定的平台下研究ShuffleNetv1和MobileNetv2的运行时间,并结合理论与实验得到了4条实用的指导原则:G1:同等通道大小最小化内存访问量对于轻量级CNN网络,常采用深度可分割卷积(depthwise separable convolutions),其中点卷积( pointwise convolution)即1x1卷积复杂度最大。这里假定输入和输出特征的通道数分别为 $c1$和$c2$,特征图的空间大小为$h \times w$,那么1x1卷积的FLOPs为$$ B=hwc_1c_2 $$对应的MAC(memory access cost)为$$ MAC = hw(c_1+c_2)+c_1c_2 $$根据均值不等式(这里假定内存足够),固定B时,MAC存在下限(令$c_2=\frac{B}{hwc_1}$),则$$ MAC \ge 2 \sqrt{hwB} + \frac{B}{hw} $$仅当$c_1=c_2$时,MAC取最小值,这个理论分析也通过实验得到证实,如下表所示,通道比为1:1时速度更快。G2:过量使用组卷积会增加MAC(memory access cost)组卷积(group convolution)是常用的设计组件,因为它可以减少复杂度却不损失模型容量。但是这里发现,分组过多会增加MAC(memory access cost)。对于组卷积,FLOPs为(其中g为组数):$$ B = hwc_1c_2/g $$对应的MAC(memory access cost)为$$ MAC = hwc_1+Bg/c_1+B/hw $$可以看到,在输入确定,B相同时,当g增加时,MAC(memory access cost)会同时增加,下表是对应的实验,所以明智之举是不要使用太大 ![[公式]](https://www.zhihu.com/equation?tex=g) 的组卷积。G3:网络碎片化会降低并行度一些网络如Inception,以及Auto ML自动产生的网络NASNET-A,它们倾向于采用“多路”结构,即存在一个lock中很多不同的小卷积或者pooling,这很容易造成网络碎片化,减低模型的并行度,相应速度会慢,这也可以通过实验得到证明。G4:不能忽略元素级操作(比如ReLU和Add)对于元素级(element-wise operators)比如ReLU和Add,虽然它们的FLOPs较小,但是却需要较大的MAC(memory access cost)。这里实验发现如果将ResNet中残差单元中的ReLU和shortcut移除的话,速度有20%的提升。4.ShuffleNet-v1 基本结构及存在的问题4.1ShuffleNet-v1基本结构其中:(a) the basic ShufflleNet unit;(b) the ShufflleNet unit for spatial down sampling (2×);4.2ShuffleNet-v1存在的问题在ShuffleNetv1的模块中,大量使用了1x1组卷积,这违背了G2原则,另外v1采用了类似ResNet中的瓶颈层(bottleneck layer),输入和输出通道数不同,这违背了G1原则。同时使用过多的组,也违背了G3原则。短路连接中存在大量的元素级Add运算,这违背了G4原则。5.ShuffleNet-v2基本块及改进分析5.1ShuffleNet-v2基本块根据前面的4条准则,作者分析了ShuffleNetv1设计的不足,并在此基础上改进得到了ShuffleNetv2,两者模块上的对比如下图所示:其中(c) the basic ShufflleNetv2 unit;(d) the ShufflleNetv2 unit for spatial down sampling (2×);DWConv: depthwise convolutionGConv:group convolution对于ShufflleNetv2基本块(the ShufflleNetv2 unit)还可以选择是否采用SE(Squeeze-and-Excitation)模块和残差(residual)结构5.2ShuffleNetv2的改进分析为了改善v1的缺陷,根据四条原则,作者提出了shufflenet v2。v2版本引入了一种新的运算:channel split(如上图网路结构中的图c)。channel split的做法:在开始时先将输入特征图在通道维度分成两个分支:通道数分别为 $c'$ 和 $c-c'$ ,实际实现时$c'=c/2$ 。一个是identity,一个经过三个conv,然后concat到一起,这个满足G4。右边的分支包含3个连续的卷积,并且输入和输出通道相同,这符合G1。而且两个1x1卷积不再是组卷积,这符合G2另外两个分支相当于已经分成两组。两个分支的输出不再是Add元素,而是concat在一起。取替了element-wise操作add。最后经过channel shuffle将两个分支的信息进行交流。channel split的作用:第一,划分一半到右分支,意味着右边计算量减少,从而可以提高channel数,提高网络capacity。第二,左分支相当于一种特征重用(feature reuse), 跟DenseNet和CondenseNet一样的思想。下图(a)为DenseNet的从source layer到target layer连接的权重的大小,可见target层前1-3层的信息对当前层帮助较大,而越远的连接比较多余。图(b)为ShuffleNet v2的情况,因为shuffle操作会导致每次会有一半的channel到下一层。因此,作者认为shufflenet跟densenet一样的利用到了feature reuse,所以有效。6.ShuffleNet-v2完整网络结构其中:1个stage=1个DSampling+Repeat个BasicUnit7.ShuffleNet-v2基本块实现(pytorch)7.1Channel Shuffle图示实现步骤假定将输入层分为 g 组,总通道数为 g × n 。首先你将通道那个维度拆分为 (g,n) 两个维度然后将这两个维度转置变成 (n,g)最后重新reshape成一个维度 g × n 。代码# Channel Shuffle def shuffle_chnls(x, groups=2): """Channel Shuffle""" bs, chnls, h, w = x.data.size() # 如果通道数不是分组的整数被,则无法进行Channel Shuffle操作,直接返回x if chnls % groups: return x # 计算用于Channel Shuffle的一个group的的通道数 chnls_per_group = chnls // groups # 执行channel shuffle操作 x = x.view(bs, groups, chnls_per_group, h, w) # 将通道那个维度拆分为 (g,n) 两个维度 x = torch.transpose(x, 1, 2).contiguous() # 将这两个维度转置变成 (n,g) x = x.view(bs, -1, h, w) # 最后重新reshape成一个维度 g × n g\times ng×n return x7.2ShufflleNetv2基本块( the basic ShufflleNetv2 unit)基本结构图示增加SE(Squeeze-and-Excitation)模块和残差(residual)结构后的基本块结构图示代码# 封装一个Conv+BN+RELU的基本块 class BN_Conv2d(nn.Module): def __init__(self, in_channels, out_channels, kernel_size, stride, padding, dilation=1, groups=1, bias=False, activation=True): # dilation=1-->卷积核膨胀 super(BN_Conv2d, self).__init__() layers = [nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, stride=stride, padding=padding, dilation=dilation, groups=groups, bias=bias), nn.BatchNorm2d(out_channels)] if activation: layers.append(nn.ReLU(inplace=True)) self.seq = nn.Sequential(*layers) def forward(self, x): return self.seq(x)# ShuffleNet-v2基本块 class BasicUnit(nn.Module): def __init__(self, in_chnls, out_chnls, is_se=False, is_residual=False, c_ratio=0.5, groups=2): super(BasicUnit, self).__init__() self.is_se, self.is_res = is_se, is_residual # 是否使用SE结构和残差结构 self.l_chnls = int(in_chnls * c_ratio) # 左侧输入通道数 self.r_chnls = in_chnls - self.l_chnls # 右侧输入通道数 self.ro_chnls = out_chnls - self.l_chnls # 右侧输出通道数 self.groups = groups # layers self.conv1 = BN_Conv2d(self.r_chnls, self.ro_chnls, 1, 1, 0) self.dwconv2 = BN_Conv2d(self.ro_chnls, self.ro_chnls, 3, 1, 1, # same padding, depthwise conv groups=self.ro_chnls, activation=None) act = False if self.is_res else True self.conv3 = BN_Conv2d(self.ro_chnls, self.ro_chnls, 1, 1, 0, activation=act) # 是否使用SE模块和residual结构 if self.is_se: self.se = SE(self.ro_chnls, 16) if self.is_res: self.shortcut = nn.Sequential() if self.r_chnls != self.ro_chnls: self.shortcut = BN_Conv2d(self.r_chnls, self.ro_chnls, 1, 1, 0, activation=False) def forward(self, x): # channel split 操作 x_l = x[:, :self.l_chnls, :, :] x_r = x[:, self.r_chnls:, :, :] # right path out_r = self.conv1(x_r) out_r = self.dwconv2(out_r) out_r = self.conv3(out_r) # 是否使用SE模块和residual结构 if self.is_se: coefficient = self.se(out_r) out_r *= coefficient if self.is_res: out_r += self.shortcut(x_r) # concatenate out = torch.cat((x_l, out_r), 1) return shuffle_chnls(out, self.groups)7.3ShufflleNetv2下采样基本块(the ShufflleNetv2 unit for spatial down sampling)图示代码# SuffleNet-v2下采样基本块 class DSampling(nn.Module): def __init__(self, in_chnls, groups=2): super(DSampling, self).__init__() self.groups = groups # down-sampling(通过stride=2实现), depth-wise conv(通过groups=in_chnls实现). self.dwconv_l1 = BN_Conv2d(in_chnls, in_chnls, 3, 2, 1, groups=in_chnls, activation=None) self.conv_l2 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0) self.conv_r1 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0) self.dwconv_r2 = BN_Conv2d(in_chnls, in_chnls, 3, 2, 1, groups=in_chnls, activation=False) self.conv_r3 = BN_Conv2d(in_chnls, in_chnls, 1, 1, 0) def forward(self, x): # left path out_l = self.dwconv_l1(x) out_l = self.conv_l2(out_l) # right path out_r = self.conv_r1(x) out_r = self.dwconv_r2(out_r) out_r = self.conv_r3(out_r) # concatenate out = torch.cat((out_l, out_r), 1) return shuffle_chnls(out, self.groups)8.ShuffleNet-v2网络结构实现# TODO参考资料ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture DesignShuffleNetV2:轻量级CNN网络中的桂冠轻量级网络之ShuffleNet v2shufflenet中channel shuffle原理PyTorch实现ShuffleNet-v2亲身实践
-
计算机技术核心期刊大全(2020年最新整理) 1、计算机学报简介:《计算机学报》是中国计算机领域的权威学术刊物。 其宗旨是报道我国计算机科学和技术领域最高水平的科研成果。 《计算机学报》创立于1978年,以中文编辑形式与读者见面,同时以英文摘要形式向国际各大检索系统提供基本内容介绍。 本刊是中国计算机领域的代表性学术刊物,作为科学研究档案,代表了计算机领域各研究阶段的水平。收录:北京大学《中文核心期刊总览》EI 工程索引(美)(2018)CSCD 中国科学引文数据库(2017-2018年度)(含扩展版)统计源核心期刊(中国科技论文核心期刊) 2、软件学报简介:《软件学报》 (月刊)创刊于1990年,由中国科学医院软件研究所和中国计算机学会联合主办。 刊载软件各领域原创研究成果的期刊,刊载的论文均经过严格的同行专家评议,2000年获中国科学院优秀科技期刊等奖。《软件学报》主要面向全球华人计算机软件学者,为全球华人计算机科学和致力于与软件技术发展同步创设以中文为中心的《中文国际软件学术杂志》的中国人提供学术交流平台。 刊载反映计算机科学和计算机软件更新理论,重视更新方法和新技术和学科发展趋势的文章主要有理论计算机科学,算法设计和分析,系统软件和软件工程,模式识别和人工数据库技术、计算机网络、信息安全、计算机图形学和计算机设计支持、多媒体技术和其他相关内容。3、自动化学报简介:《自动化学报》 (月刊)创刊于1963年,是中国自动化学会、中国科学院自动化研究所共同主办的高级学术期刊。 刊载自动化科学和技术领域的高水平理论性和应用性的科研成果。 内容如下:1)自动控制2 )系统理论和系统工程3 )自动化工过程技术和应用4 )自动化系统计算机辅助技术5 )机器人6 )人工智能和智能控制7 )模式识别和图像处理8 )信息处理和信息服务9 )基于网络的自动化等。4、计算机研究与发展简介:《计算机研究与发展》 (月刊)创刊于1958年,中国科学医院计算技术研究所,中国计算机学会主办。 刊载内容: 计算机科学技术领域高水平的学术论文,最新科研成果和重大应用成果。 刊载内容:评估、计算机基础理论、软件技术、信息安全、计算机网络、图形图像、体系结构、人工智能、计算机应用、数据库技术、存储技术和计算机相关领域。5、控制与决策简介:《控制与决策》创刊于1986年,由教育部主管、东北大学主办。本刊是自动控制与管理决策领域的学术性期刊,主要刊登自动控制理论及其应用,系统理论与系统工程,决策理论与决策方法,自动化技术及其应用,人工智能与智能控制,机器人,以及自动控制与决策领域的其他重要课题。主要栏目有:综述与评论、论文与报告、短文、信息与动态等。6、中国图象图形学报简介:《中国图象图形学报》是由中国科学院遥感与数字地球研究所、中国图象图形学会、北京应用物理与计算数学研究所共同创办,是集计算机图像图形高科技理论、技术方法与应用研究成果产业化于一体的综合性学术期刊。主要刊登图像图形科学及其密切相关领域的基础研究和应用研究方面,并具有创新性的、高水平科研学术论文,论文形式主要有综述、技术报告,项目进展、学术动态、新技术评论、新产品介绍和产业化研究等。内容涉及图像分析和识别、图像理解和计算机视觉、计算机图形学、虚拟现实和增强现实、系统仿真、动漫等众多领域,同时还根据各时期的研究热点和前沿课题开设相应的主 题专栏。读者对象不从事国防、军事、航空、航天、通信、电子、汽车、农业、气象、环保、遥感、测绘、油田、建筑、交通、金融、电信、教育、医疗、影视、艺术等科技人员、企业主管及高等院校的研究生,大学生。7、计算机辅助设计与图形学学报简介:创刊于1989年,是我国CAD和计算机图形学领域第一个公开出版的学术刊物,原为季刊,1996年起改为双月刊,从2000年起改为月刊。该刊以快速传播CAD与计算机图形学领域的知识与经验为目的,刊登有创新的学术论文,报导最新科研成果和学术动态,及时反映该领域发展水平与发展方向。读者对象为从事CAD和计算机图形及其他有关学科的科研、工程技术人员及高等院校师生。8、计算机应用研究简介:《计算机应用研究》创刊于1984年,是由国家科技部所属四川省计算机研究院主办,北京、天津、山东、吉林、云南、贵州、安徽、河南、广西、甘肃、内蒙古等十余省市计算中心协办的计算技术类学术刊物。主要刊载内容包括本学科领域高水平的学术论文、本学科最新科研成果和重大应用成果。栏目内容涉及计算机学科新理论、计算机基础理论、算法理论研究、算法设计与分析、系统软件与软件工程技术、模式识别与人工智能、体系结构、先进计算、并行处理、数据库技术、计算机网络与通信技术、信息安全技术、计算机图像图形学及其最新热点应用技术。9、计算机科学简介:《计算机科学》(Computer Science)创刊于1974年1月(月刊),由重庆西南信息有限公司(原科技部西南信息中心)主管主办,曾用刊名计算机应用与应用数学,是中国计算机学会(CCF)会刊。主要报道国内外计算机科学与技术的发展动态、涉及面广的方法论与技术、反映新苗头且能起承先启后作用的研究成果。10、计算机应用简介:《计算机应用》创刊于1981年,是中国计算机学会会刊。本刊旨在介绍计算机应用技术,推动经济发展和科技进步,促进计算机应用创新的开发。 多年来,中国计算机学会一直关注着国内计算机各应用领域的专家。读者对象:计算机应用工程技术人员、大专院校师生、企事业单位管理干部、科研院所从事计算机开发应用人员、计算机公司职员等必备的工具,是启迪思维、开拓进取、更新知识、开发应用的良师益友。11、计算机工程简介:《计算机工程》创刊于1975年,是中国电子科技集团公司第三十二研究所(华东计算技术研究所)和上海市计算机学会主办的学术性刊物,刊登内容: 热点与综述、人工智能与模式识别、先进计算与数据处理、网络空间安全、移动互联与通信技术、体系结构与软件技术、图形图像处理、开发研究与工程应用等。12、控制理论与应用简介:《控制理论与应用》1984年创刊,是教育部主管、由华南理工大学和中科院数学与系统科学研究院联合主办的全国学术刊物。主要报道在控制理论与应用方面的高水平学术论文,特别是系统控制、最优化和自动化领域中的新兴问题、原创方法及尖端技术,为控制领域的科学家和工程师们提供一个交流最新成果的平台。主要报道系统控制科学中具有新观念、新思想的理论研究成果及其在各个领域中, 特别是高科技领域中的应用研究成果和在国民经济有关领域技术开发、技术改造中的应用成果. 内容包括: 1) 系统建模、辨识与估计; 2) 数据驱动建模与控制;3)过程控制; 4)智能控制; 5)网络控制; 6) 非线性系统控制; 7) 随机系统控制; 8) 预测控制; 9) 多智能体系统及分布式控制; 10)鲁棒与自适应控制;11) 系统优化理论与算法; 12) 混杂系统与离散事件系统; 13)工程控制系统;14)航空与航天控制系统;15)新兴战略产业中的控制系统;16)博弈论与社会网络;17)微纳与量子系统;18)模式识别与机器学习;19)智能机器人;20) 先进控制理论在实际系统中的应用; 21)系统控制科学中的其它重要问题。《控制理论与应用》的读者对象是从事控制理论与应用研究的科技人员、高校师生及其他有关人员。设置的栏目主要有: 综述与评论,长论文,论文, 短文, 书刊评介, 读者来信, 国内外学术活动信息等。13、机器人简介:《机器人》是经中华人民共和国新闻出版局批准,由中国科学院主管、中国科学院沈阳自动化研究所、中国自动化学会联合主办类核心期刊,主要报告中国在机器人学和相关领域创新、高水平、重要学术进展和研究成果,由中国科学出版社出版。本刊读者包括国内外大学、科研机构和相关技术领域的教师、研究者、工程技术人员和博士、硕士研究生等。14、中文信息学报简介:《中文信息学报》 (双月刊)创刊于1986年,经国家科学委员会批准,由中国科学技术协会主管、中文信息学会和中国科学院软件研究所共同出版,是中文信息学会会刊。着重刊载中文信息处理的基础理论和应用技术研究的学术论文,以及相关综述、研究成果、技术报告、出版物评论、专题讨论、国内外学术动态等。 读者对象:广泛的计算机科学研究者、工程技术人员、软件开发与应用者、高校师生、研究生等,是计算机界中文信息处理者的重要参考书。15、模式识别与人工智能简介:《模式识别与人工智能》 (双月刊)创刊于1989年,是中国自动化学会、国家智能计算机研发中心和中国科学院合肥智能机械研究所共同主办、科学出版社出版的学术期刊。 本刊主要发表模式识别、人工智能、智能系统等研究成果和进展,旨在推动信息科学技术的发展。16、计算机集成制造系统简介:《计算机集成制造系统》 (月刊)创刊于1995年,国家863计划CIMS主题办公室,中国兵器工业第210研究所主办。 为国家级学术刊物交流国内外CIMS的研究、开发和应用信息,旨在推动和促进中国CIMS的发展。 主要报道国内外关系发展计算机集成制造系统的政策措施、重点、趋势、科研动态、科技成果、推广应用、产品开发和学术活动等内容。 有综述、论文、专家论坛、企业实践和动态信息等栏目。17、计算机工程与应用简介:《计算机工程与应用》是由中国电子科技集团公司主管,华北计算技术研究所主办的面向计算机全行业的综合性学术刊物,报导范围为行业最新研究成果与学术领域最新发展动态;具有先进性和推广价值的工程方案;有独立和创新见解的学术报告;先进、广泛、实用的开发成果。读者对象为计算机相关专业科研人员,工程项目的决策、开发、设计及应用人员,大专院校师生。18、系统仿真学报简介:《系统仿真学报》创刊于1989年7月,是中国仿真学会会刊(2016年2月,原中国系统仿真学会变更为中国仿真学会),由中国仿真学会和北京仿真中心联合主办,是中国仿真技术领域具有权威性、代表性的学术刊物。其宗旨是报道我国仿真技术领域具有国际、国内领先水平的科研成果,刊登具有创新性学术见解的研究论文。19、传感技术学报简介:《传感技术学报》创刊于1988年,由中华人民共和国教育部主管,是中国微米纳米技术学会会刊,挂靠东南大学编辑、出版和发行的学术性刊物。覆盖技术领域:MEMS、各类传感器材料、结构、器件和系统、传感器信号处理、无线传感技术、传感器应用。20、小型微型计算机系统简介:《小型微型计算机系统》创刊于1980年。该刊由中国科学院主管,中国科学院沈阳计算技术研究所主办,为中国计算机学会会刊,月刊,国内外公开发行。刊登的内容涵盖了计算机学科的各个领域,包括计算机科学理论、体系结构、软件、数据库理论、网络(含传感器网络)、人工智能与算法、服务计算、计算机图形与图像等。21、计算机工程与设计简介:《计算机工程与设计》创办于1980年,是由中国航天科工集团主管、中国航天科工集团七〇六所主办的中国计算机技术领域的学术性期刊。 办刊宗旨:本刊以传播新技术、促进学术交流为宗旨,坚持深度与广度、理论与应用相结合的方针,着力报道计算机前沿技术和热点技术,欢迎有创新和独立学术见解的学术论文,包括基金项目论文、获奖课题论文、学术会议优秀论文、博士和硕士论文等。22、遥感技术与应用简介:《遥感技术与应用》是综合性学术刊物,主要刊登国内外遥感理论、技术及应用研究领域的学术论文与综述,优先报道国内外遥感研究与应用的新技术、新理论、新方法和新成果,推动高新技术在地球科学研究及社会发展中的应用,重点介绍国家自然科学基金项目、交流国家攀登计划、攻关计划工作等科研成果。针对目前遥感领域的热点问题和发展动态,经第六届编委会讨论决定,将栏目细化调整为微波遥感、光学遥感、数据处理、模型与反演、遥感应用、专家述评、GIS、深空探测、重大项目、综述等。23、国土资源遥感简介:《国土资源遥感》是由中国地质调查局主管,中国自然资源航空物探遥感中心主办的技术性刊物(季刊,国内外公开发行),创刊于1989年。主要刊登实用性强的遥感、GIS及GPS(3S)技术理论及其应用论文,宣传3S技术在国土资源调查与开发、国土整治的规划与管理,环境和灾害监测,水文地质、工程地质勘查,建设工程选址、选线及城市规划等领域应用的新方法和重要成果,以从事国土资源遥感及其相关研究领域的研究人员、应用人员及大专院校有关师生为读者对象。24、计算机科学与探索简介:《计算机科学与探索》是由中国电子科技集团公司主管、华北计算技术研究所主办的国内外公开发行的高级学术期刊。报道计算机(硬件、软件)各学科具有创新性、前沿性、开拓性、探索性的科研成果。 内容包括高性能计算机、体系结构、并行处理、计算机科学更新理论、算法设计与分析、人工智能和模式识别、系统软件、软件工程、数据库、计算机网络、信息安全包括图形学和计算机辅助设计、虚拟现实、多媒体技术和交叉学科的相互渗透和新理论的推导等。25、信息与控制简介:《信息与控制》是经中华人民共和国新闻出版总署批准,由中国科学院主管,中国科学院沈阳自动化研究所、中国自动化学会共同主办的科技类核心期刊,主要刊载信息与控制科学领域基础研究和应用基础研究方面具有创新性的、高水平的、有重要意义的研究成果,由科学出版社出版。重点关注控制科学与技术、与控制理论相关的应用信息技术在机械制造、能源电力、冶金化工、资源环境、航空工业以及国防工业等国家重要高科技和经济领域中的应用研究成果。主要内容包括:1)控制理论与控制工程;2)智能信息处理;3)人工智能与模式识别;4)先进控制与优化技术;5)企业信息管理与信息系统;6)工业控制网络与系统;7)人机系统等。26、智能系统学报简介:《智能系统学报》是由中国人工智能学会和哈尔滨工程大学联合主办,是中国人工智能学会会刊。主要刊登神经网络与神经计算、智能信息处理、自然语言理解、智能系统工程、机器翻译、复杂系统、机器学习、知识工程与分布式智能、机器人、智能制造、粗糙集与软计算、免疫系统、机器感知与虚拟现实、智能控制与智能管理、可拓工程、人工智能基础等内容。27、计算机应用与软件简介:《计算机应用与软件》创刊于1984年,由上海市计算技术研究所和上海计算机软件技术开发中心共同主办。注重刊登反映计算机应用和软件技术开发应用方面的新理论、新方法、新技术以及创新应用的文章。主要栏目包括:最新技术动态、综合评述、软件技术与研究、数据工程、应用技术与研究、网络与通信、多媒体技术应用、人工智能与识别、图像处理与应用、嵌入式软件与应用、算法、安全技术、信息技术交流及其他相关内容。主要面向从事计算机应用和软件技术开发的科研人员、工程技术人员、高校师生等。28、计算机工程与科学简介:《计算机工程与科学》隶属于中国人民解放军国防科技大学计算机学院,是计算机类综合性学术刊物,1973年创刊,是中国计算机学会会刊,由国防科技大学计算机学院主办。注重刊登计算机学科在理论、工程与应用等方面的研究论文、技术报告和科研成果,主要涉及计算机体系结构、并行处理、超级计算、人工智能、软件工程、计算机仿真、多媒体与可视化、数据库、计算机网络与分布式处理、计算机安全与保密、中文信息处理、微机开发与应用及其他相关内容。29、遥感信息简介:《遥感信息》(双月刊)创刊于1986年,是我国最早批创办的遥感类期刊之一。该刊由中华人民共和国自然资源部主管,中国测绘科学研究院主办。研究内容包括遥感、地理信息系统技术更新理论、传播遥感和地理信息系统技术知识科学,介绍国内外传播新方法遥感和地理信息系统成果的发展趋势。30、控制工程简介:《控制工程》是教育部科技司主管、东北大学主办的学术类期刊。常设栏目: 工业过程管理与决策系统、决策与控制一体化系统、工业过程及控制系统、运动体控制系统、安全监控系统、建模与仿真系统、工业互联网系统、人工智能驱动的自动化等。主要读者对象为从事于自动化工程技术的高等院校教师、研究生,科研院所的研究人员,工矿企业的工程技术人员等。31、微电子学与计算机简介:本刊创于1972年,是中国微电子技术与计算机技术结合的唯一专业的国家汉语核心期刊,同时也是中国计算机学会杂志。 本杂志旨在以认真、追求创新的人为本,研究使用的弘扬科学追求真理。 本刊在国内公开发行,为科研院所、厂矿技术人员、大学教师和学生管理人员及时提供国内微电子和计算机行业的最新科研成果、学术和工程技术动态,是比较实用的参考资料和科学决策的正确依据。32、计算机仿真简介:本刊是我国航天科学工业集团公司的主管,航天科学工业集团十七所主办。 这是模拟技术领域的综合性科技期刊。内容包括国内、外部仿真技术各领域研究理论和技术新成果。 在发行的文章中,近年来国家资金项目约占20%~30%。参考资料计算机技术核心期刊大全(2020年最新整理)计算机核心期刊排名及投稿经验
-
VOC数据集中的图片宽度和高度取整 1.针对问题在数据标注时由于设置问题导致生成的最终的XML文件中的图片的width和height变成了小数,导致在运行某些代码时候会发生异常。样例文件如下所示<?xml version="1.0" ?> <annotation> <folder>/pool/label/209-20180708-08310907/JPEGImages</folder> <filename>/pool/label/209-20180708-08310907/JPEGImages/209-20180708-08310907_frame00731.jpg</filename> <source> <database>Unknown</database> </source> <size> <width>1920.0</width> # 问题所在 <height>1080.0</height> # 问题所在 <depth>3</depth> </size> <segmented>0</segmented> <object> <name>RefuelVehicle</name> <pose>Unspecified</pose> <truncated>0</truncated> <difficult>0</difficult> <bndbox> <xmin>664</xmin> <ymin>368</ymin> <xmax>794</xmax> <ymax>464</ymax> </bndbox> </object> ······ </annotation>2.代码实现# 导包 import xmltodict import os from progressbar import * import numpy as np import time import matplotlib.pyplot as plt import xmltodict from xml.dom import minidom data_root = "/data/jupiter/project/dataset/VOC_zd" xml_dir= os.path.join(data_root,"Annotations") #xml文件路径(Annotations) width_height_list = [] #用于存储统计结果 #进度条功能 widgets = ['box width_height 校准: ',Percentage(), ' ', Bar('#'),' ', Timer(),' ', ETA()] pbar = ProgressBar(widgets=widgets, maxval=len(os.listdir(xml_dir))).start() count = 0 for xml_file in os.listdir(xml_dir): # 拼接xml文件的path xml_file_path = os.path.join(xml_dir,xml_file) # 读取xml文件到字符串 with open(xml_file_path) as f: xml_str = f.read() # xml字符串转为字典 xml_dic = xmltodict.parse(xml_str) # 获取图片的width、height img_width = xml_dic["annotation"]["size"]["width"] img_height = xml_dic["annotation"]["size"]["height"] if img_width.endswith(".0"): xml_dic["annotation"]["size"]["width"] = img_width[:-2] xml_dic["annotation"]["size"]["height"] = img_height[:-2] xmlstr = xmltodict.unparse(xml_dic) xml = minidom.parseString(xmlstr) xml_pretty_str = xml.toprettyxml() with open(xml_file_path,"w") as f: f.write(xml_pretty_str) # 更新进度条 count += 1 pbar.update(count) #释放进度条 pbar.finish()
-
快速使用Mobilenet SSD进行训练VOC格式的数据集 1.训练步骤STEP1:下载代码并配置环境下载代码git clone https://github.com/lufficc/SSD.git cd SSD修改requirements.txttorch==1.5 torchvision==0.5 yacs tqdm opencv-python vizer根据requirements.txt完成环境配置# Required packages: torch torchvision yacs tqdm opencv-python vizer conda create -n ssd-lufficc python=3.8 pip install -r requirements.txt额外补充安装pip install tensorboardX pip install sixSTEP2:在当前目录下建立数据集文件夹的软连接或者复制数据集到当前文件夹完成后文件夹结构├──VOC_data/VOC2007/ ├── Annotations #可以采用软连接的方式避免对大量数据进行复制 ├──放置xml文件 #TODO ├── JPEGImages ├──放置img文件 #TODO ├──ImageSets/Main #可以采用软连接的方式避免对大量数据进行复制 ├── split.py #数据分割脚本,用于生成训练索引文件split.py文件内容import os import random random.seed(0) xmlfilepath=r'./Annotations' saveBasePath=r"./ImageSets/Main/" trainval_percent=0.9 # 可以自己设置 train_percent=0.9 # 可以自己设置 temp_xml = os.listdir(xmlfilepath) total_xml = [] for xml in temp_xml: if xml.endswith(".xml"): total_xml.append(xml) num=len(total_xml) list=range(num) tv=int(num*trainval_percent) tr=int(tv*train_percent) trainval= random.sample(list,tv) train=random.sample(trainval,tr) print("train and val size",tv) print("traub suze",tr) ftrainval = open(os.path.join(saveBasePath,'trainval.txt'), 'w') ftest = open(os.path.join(saveBasePath,'test.txt'), 'w') ftrain = open(os.path.join(saveBasePath,'train.txt'), 'w') fval = open(os.path.join(saveBasePath,'val.txt'), 'w') for i in list: name=total_xml[i][:-4]+'\n' if i in trainval: ftrainval.write(name) if i in train: ftrain.write(name) else: fval.write(name) else: ftest.write(name) ftrainval.close() ftrain.close() fval.close() ftest .close()python split.py配置文件根目录的环境变量export VOC_ROOT="./VOC_data" #/path/to/voc_rootSTEP3:修改配置文件 vim configs/mobilenet_v2_ssd320_voc0712.yamlMODEL: NUM_CLASSES: 11 # 修改NUM_CLASSES BOX_HEAD: PREDICTOR: 'SSDLiteBoxPredictor' BACKBONE: NAME: 'mobilenet_v2' OUT_CHANNELS: (96, 1280, 512, 256, 256, 64) PRIORS: FEATURE_MAPS: [20, 10, 5, 3, 2, 1] STRIDES: [16, 32, 64, 107, 160, 320] MIN_SIZES: [60, 105, 150, 195, 240, 285] MAX_SIZES: [105, 150, 195, 240, 285, 330] ASPECT_RATIOS: [[2, 3], [2, 3], [2, 3], [2, 3], [2, 3], [m2, 3]] BOXES_PER_LOCATION: [6, 6, 6, 6, 6, 6] INPUT: IMAGE_SIZE: 320 DATASETS: TRAIN: ("voc_2007_trainval", "voc_2012_trainval") # TODO TEST: ("voc_2007_test", ) SOLVER: MAX_ITER: 120000 LR_STEPS: [80000, 100000] GAMMA: 0.1 BATCH_SIZE: 32 LR: 1e-3 OUTPUT_DIR: 'outputs/mobilenet_v2_ssd320_voc0712STEP4:修改类别信息vim ssd/data/datasets/voc.pyclass VOCDataset(torch.utils.data.Dataset): class_names = ('person','bridgevehicle','luggagevehicle','plane','refuelvehicle','foodvehicle','rubbishvehicle','watervehicle','platformvehicle','tractorvehicle','bridgeconnector') # 改成自己的class注意,类名必须小写 ······STEP5: 模型训练修改默认所用的device和batch_size vim ssd/config/defaults.py# 修改以下内容 _C.MODEL.DEVICE = "cuda:1" # cpu/cuda/cuda:1 _C.SOLVER.BATCH_SIZE = 128 _C.TEST.BATCH_SIZE = 32单GPU# for example, train SSD300: python train.py --config-file configs/mobilenet_v2_ssd320_voc0712.yaml多GPU# for example, train SSD300 with 2 GPUs: export NGPUS=2 python -m torch.distributed.launch --nproc_per_node=$NGPUS train.py --config-file configs/mobilenet_v2_ssd320_voc0712.yaml SOLVER.WARMUP_FACTOR 0.03333 SOLVER.WARMUP_ITERS 10002.模型评估单GPU# for example, evaluate SSD300: python test.py --config-file configs/mobilenet_v2_ssd320_voc0712.yaml多GPU# for example, evaluate SSD300 with 2 GPUs: export NGPUS=2 python -m torch.distributed.launch --nproc_per_node=$NGPUS test.py --config-file configs/mobilenet_v2_ssd320_voc0712.yaml3.模型调用(预测)#TODO参考资料https://github.com/qfgaohao/pytorch-ssd
-
python使用opencv读取海康摄像头视频流rtsp pythons使用opencv读取海康摄像头视频流rtsp海康IPcamera rtsp地址和格式:rtsp://[username]:[password]@[ip]:[port]/[codec]/[channel]/[subtype]/av_stream 说明: username: 用户名。例如admin。 password: 密码。例如12345。 ip: 为设备IP。例如 192.0.0.64。 port: 端口号默认为554,若为默认可不填写。 codec:有h264、MPEG-4、mpeg4这几种。 channel: 通道号,起始为1。例如通道1,则为ch1。 subtype: 码流类型,主码流为main,辅码流为sub。python读取视频流import cv2 url = 'rtsp://admin:!itrb123@10.1.9.143:554/h264/ch1/main/av_stream' cap = cv2.VideoCapture(url) while(cap.isOpened()): # Capture frame-by-frame ret, frame = cap.read() # Display the resulting frame cv2.imshow('frame',frame) if cv2.waitKey(1) & 0xFF == ord('q'): break # When everything done, release the capture cap.release() cv2.destroyAllWindows()





![[TeraCloud] 免费获取20GB的WebDAV--vps硬盘扩容](/usr/uploads/auto_save_image/93d5c5e6aa17a2edca0554496948c589.png)